Comprehensive Report: Comparing DC and AC Motor Design and Operation
VerifiedAdded on 2022/11/25
|11
|1409
|332
Report
AI Summary
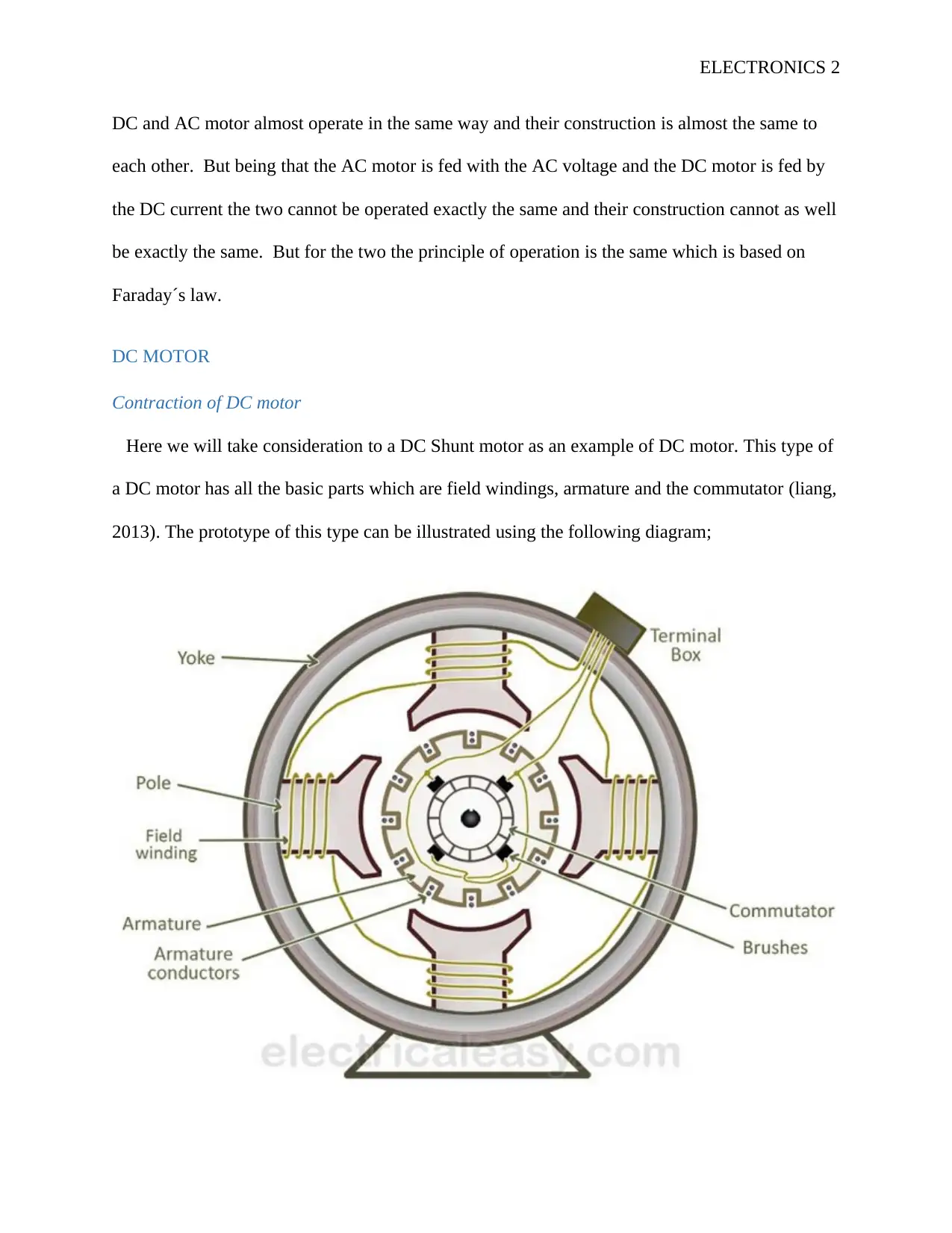
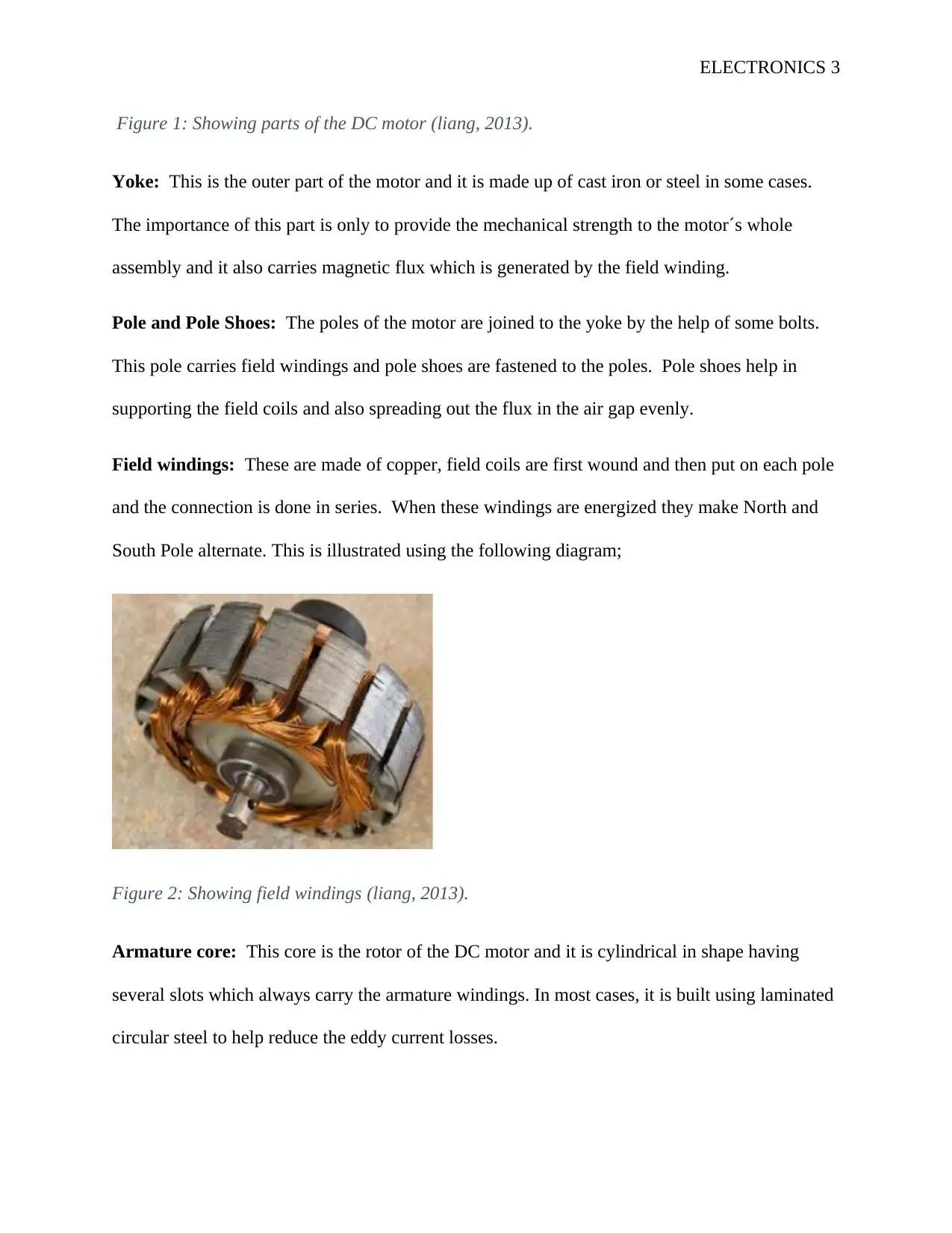
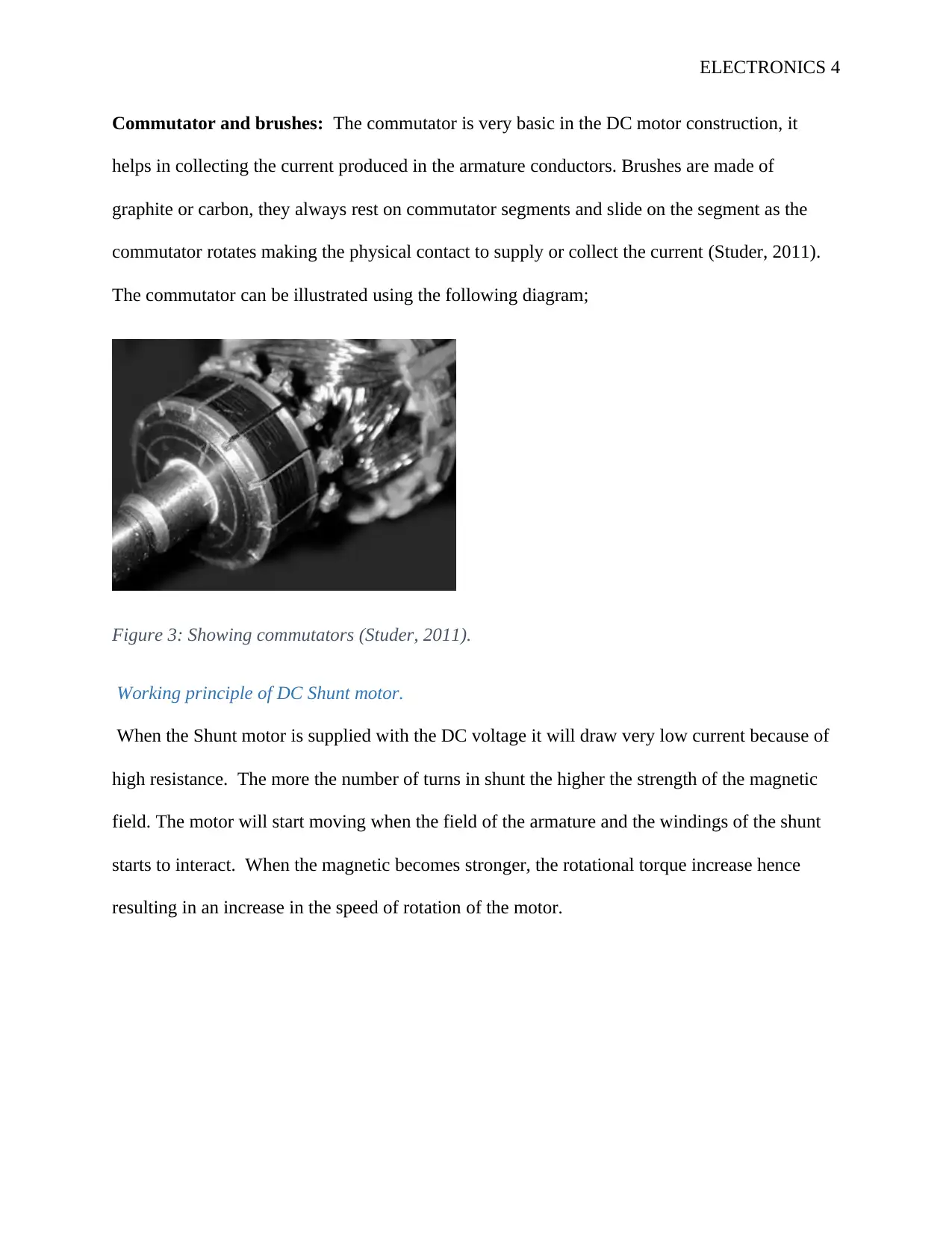
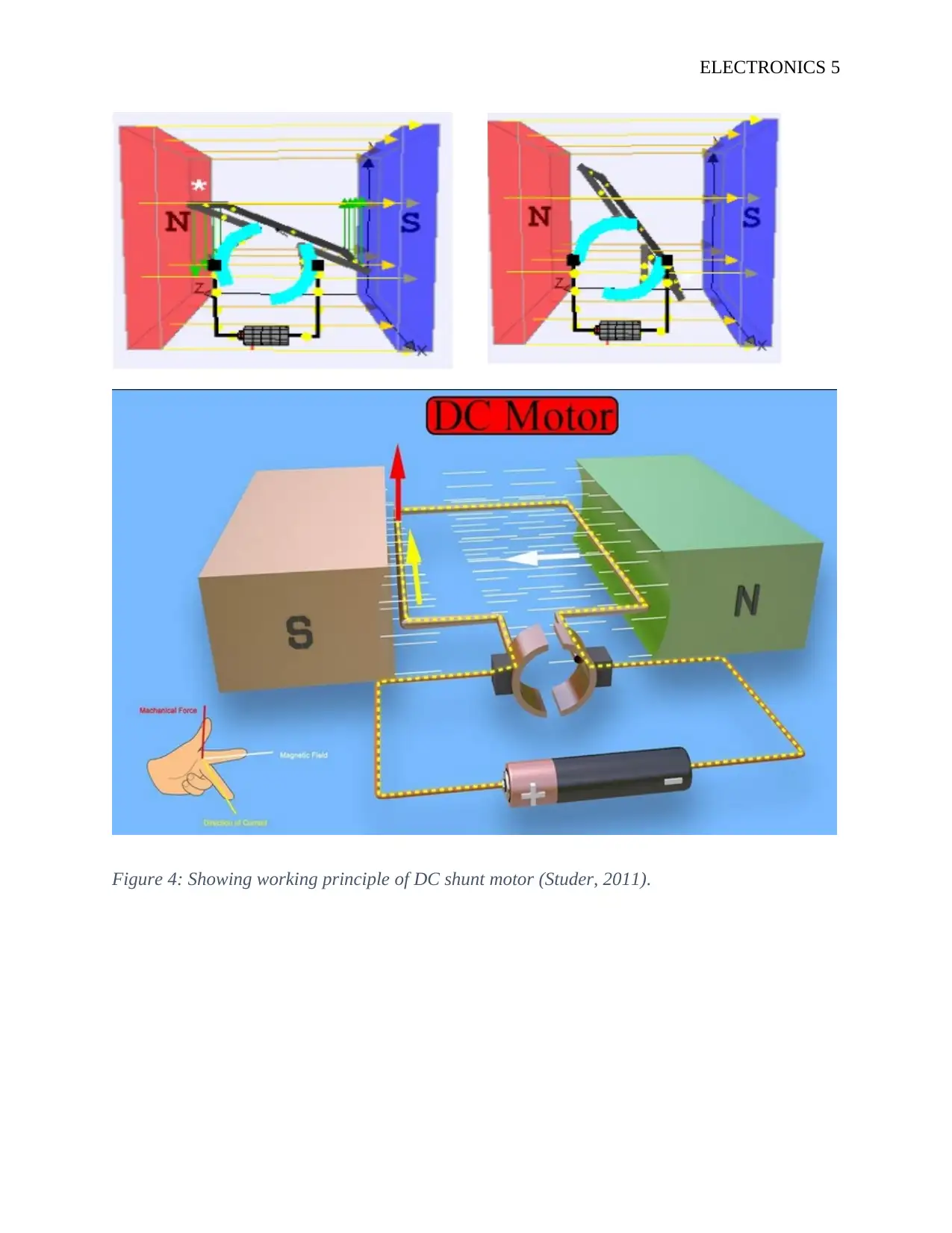
This report provides a comprehensive comparison of DC and AC motors, focusing on their construction and operational principles. The report begins by examining the DC shunt motor, detailing its components such as the yoke, poles, field windings, armature core, commutator, and brushes. It then explains the working principle of the DC motor, emphasizing the interaction between the armature and field windings. The report then transitions to the AC synchronous motor, describing its stator frame, stator core, stator windings, and rotor (specifically the salient pole type). The working principle of the AC motor is explained, highlighting how the rotating stator poles interact with the rotor to generate torque. The report references key equations and diagrams to illustrate the concepts. This analysis aims to provide a clear understanding of the similarities and differences between these two types of electric motors.

1 out of 11
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.