University of Leeds: DC Motor Speed Control PI Controller Report
VerifiedAdded on 2022/08/26
|12
|2505
|13
Report
AI Summary
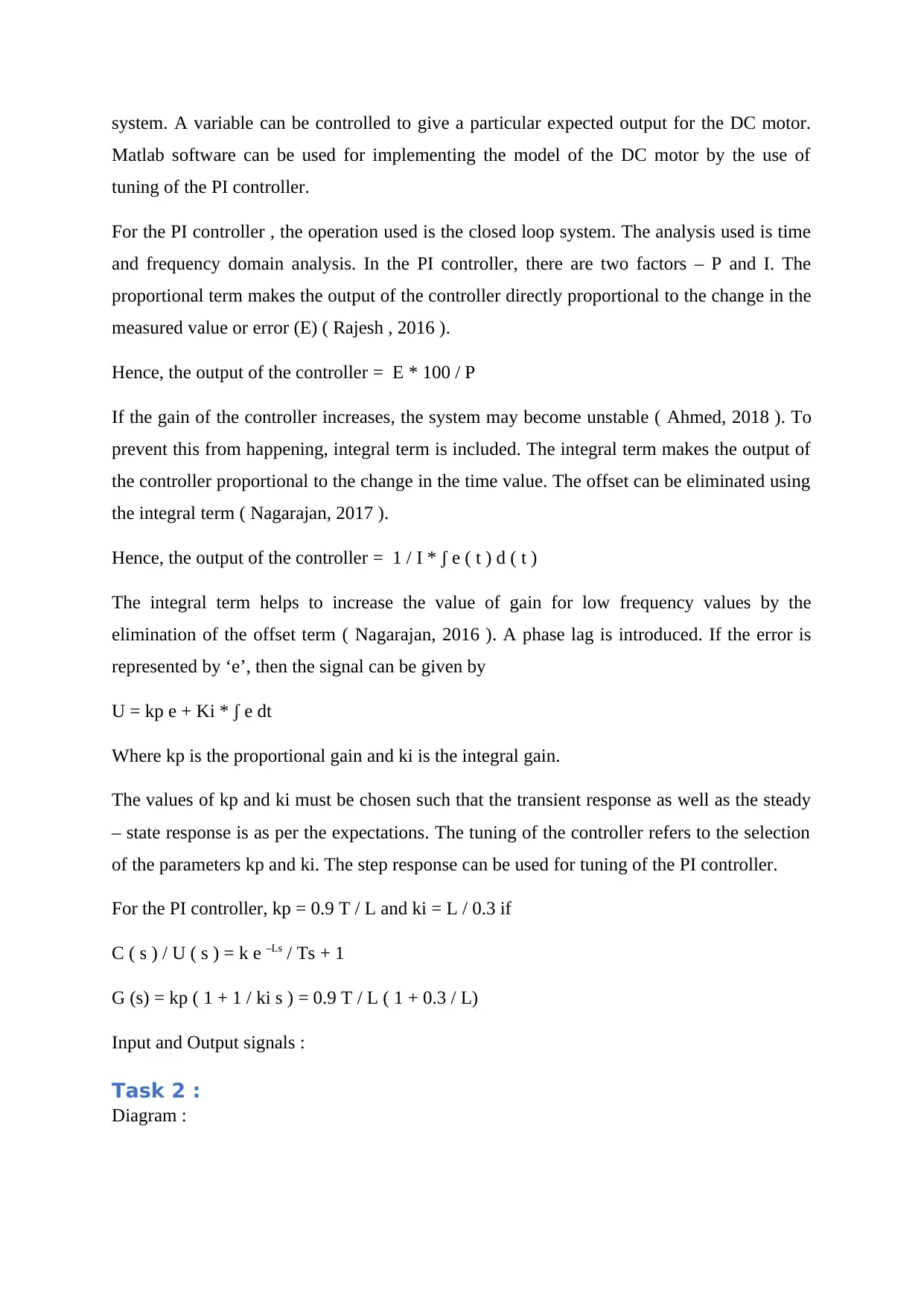
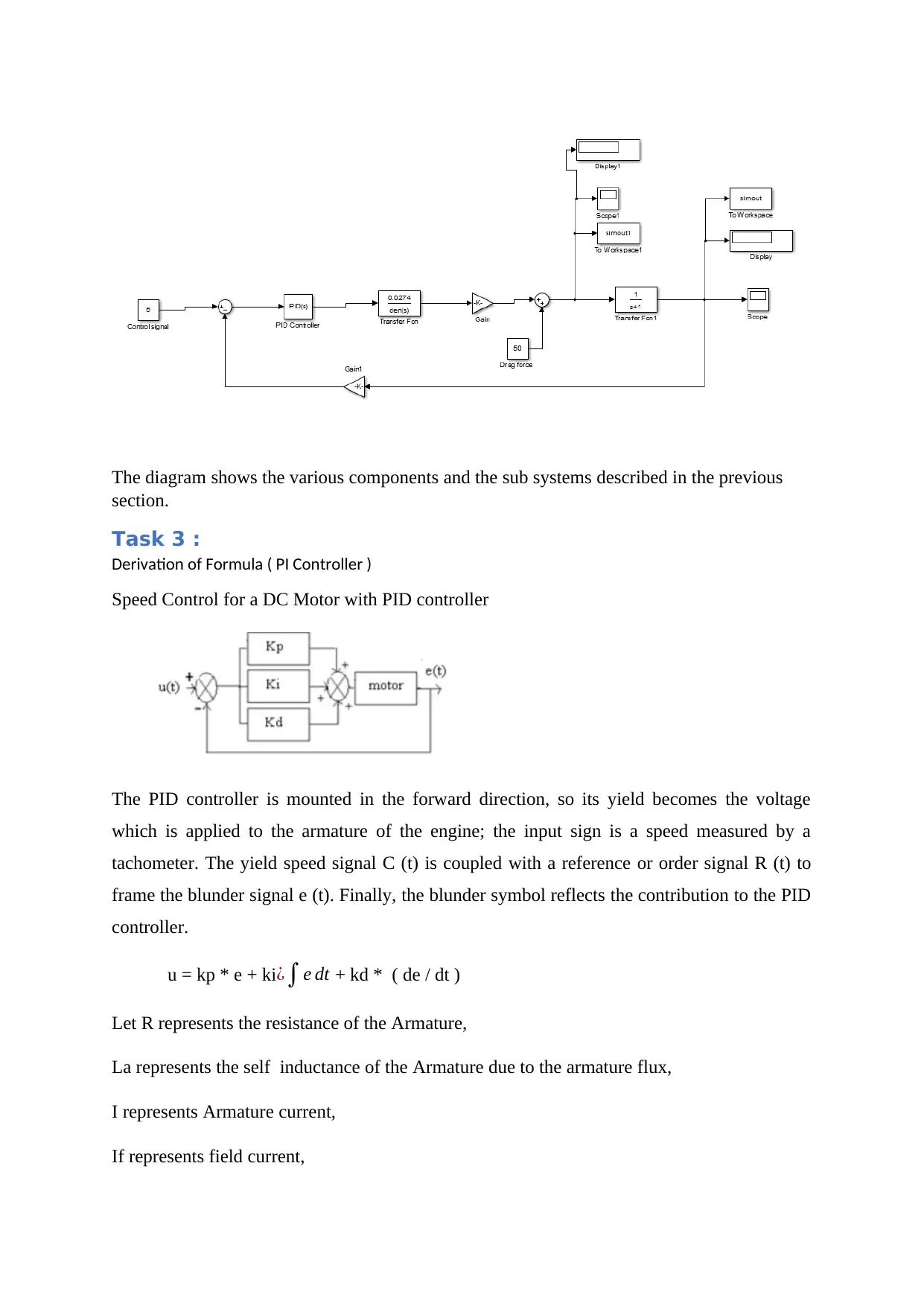
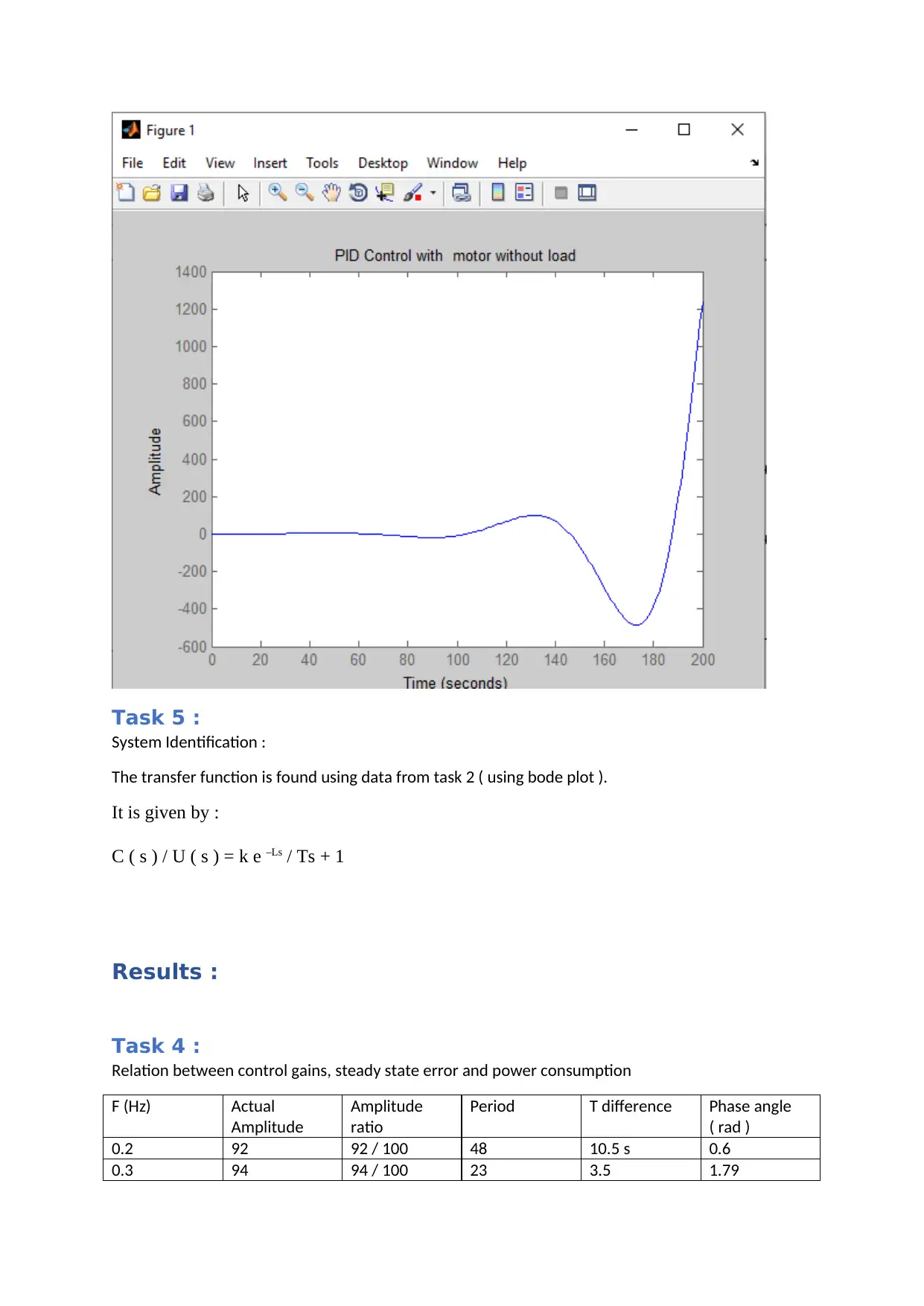
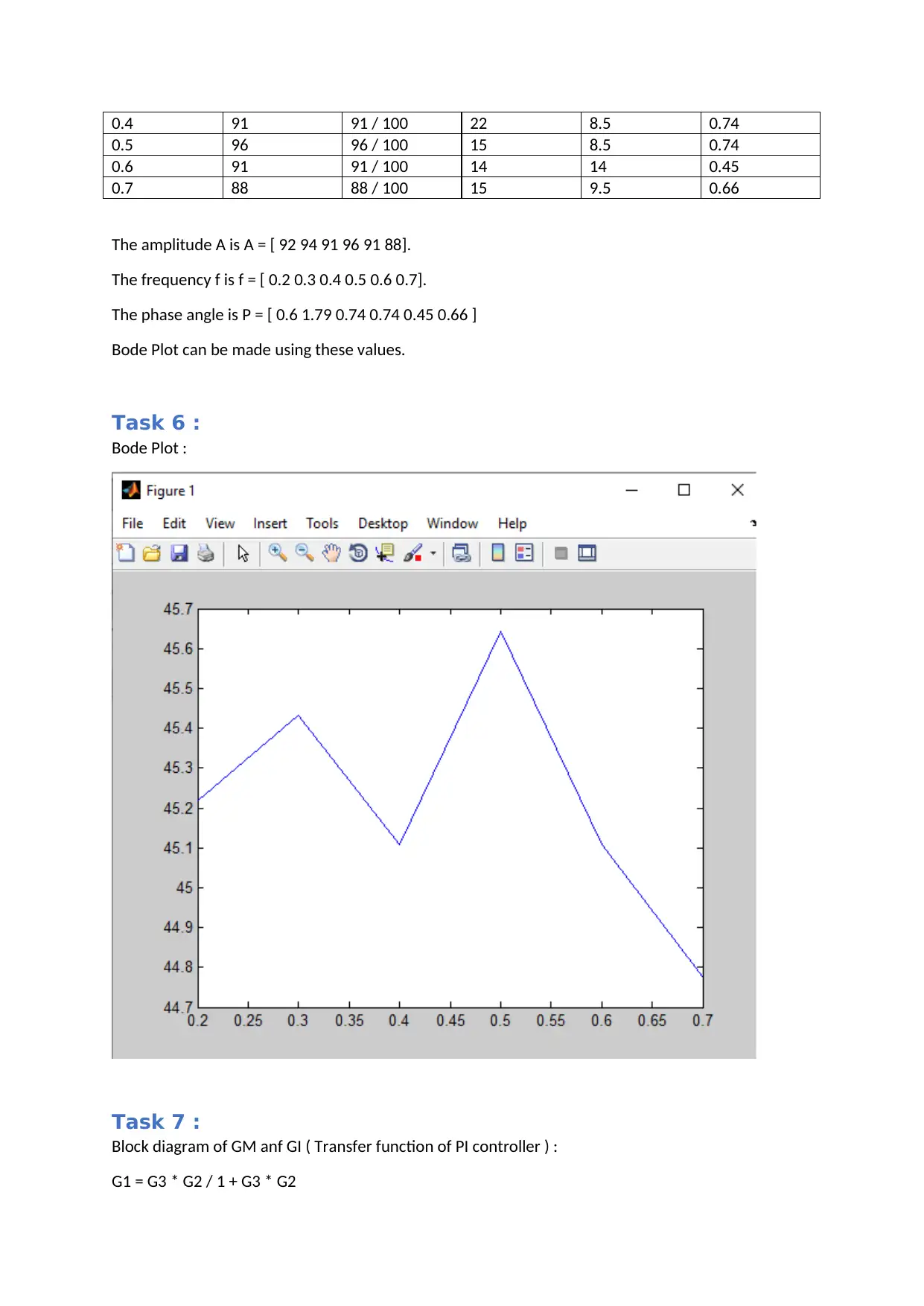
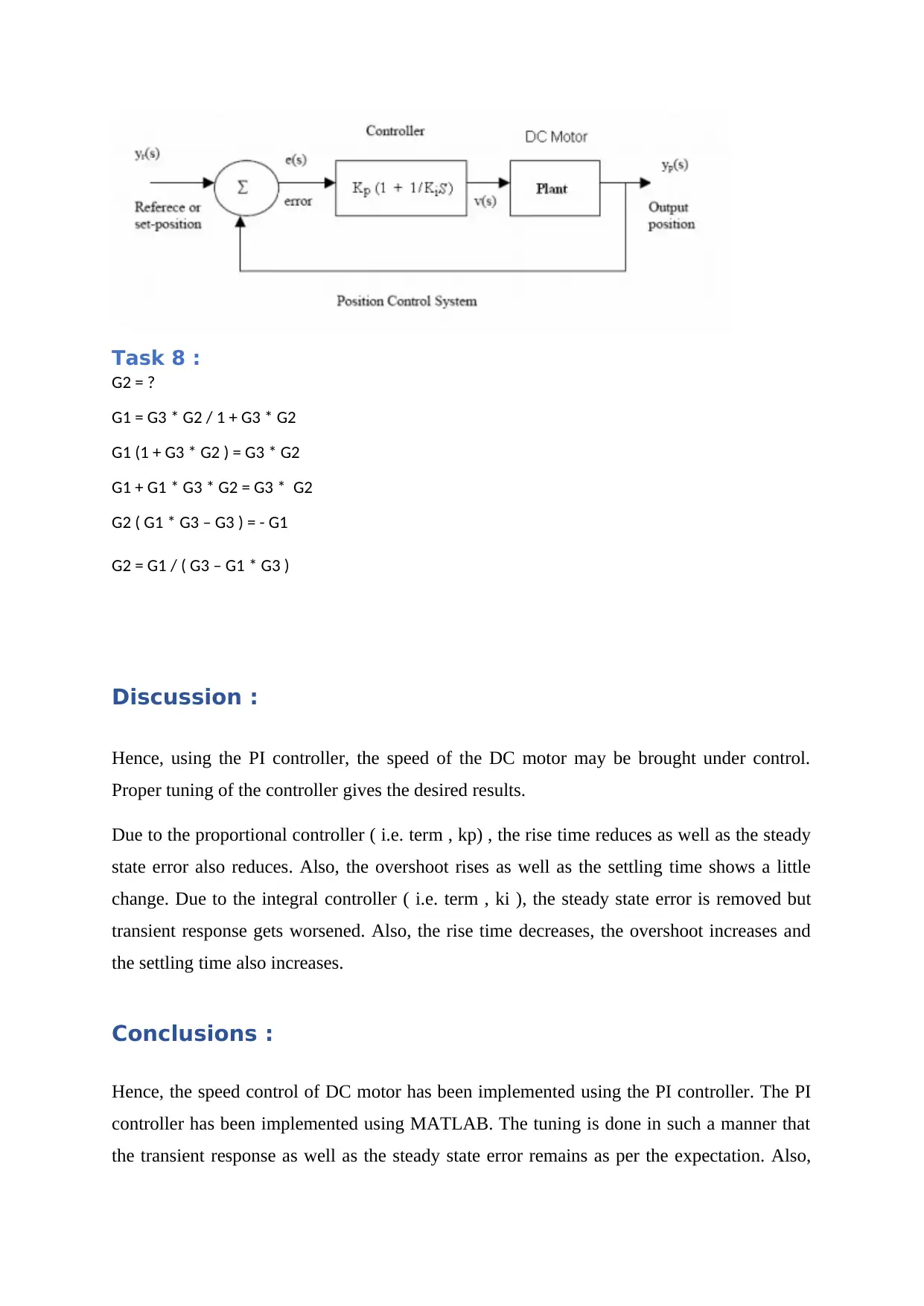
This report details a lab experiment focused on DC motor speed control using a Proportional-Integral (PI) controller. The experiment involves understanding the components of a DC motor and constructing a speed control system. The report outlines the methods, including the use of an Arduino board, encoder, and software like MATLAB, to count encoder pulses and implement the PI controller. The objectives include identifying components, constructing the system, understanding LabView diagrams, constructing PI control, tuning gains, and identifying a transfer function. The report includes derivations, formulas, and analysis of the control gains, steady-state error, and power consumption, with results presented in tables and Bode plots. The discussion section analyzes the effects of proportional and integral controllers on rise time, steady-state error, overshoot, and settling time. The conclusion summarizes the successful implementation of DC motor speed control using a PI controller, highlighting the importance of proper tuning for desired performance.
1 out of 12
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.