Electrical Machines: Analysis of Single-Phase Rectifiers and DC Drives
VerifiedAdded on 2022/12/29
|15
|2798
|1
Report
AI Summary
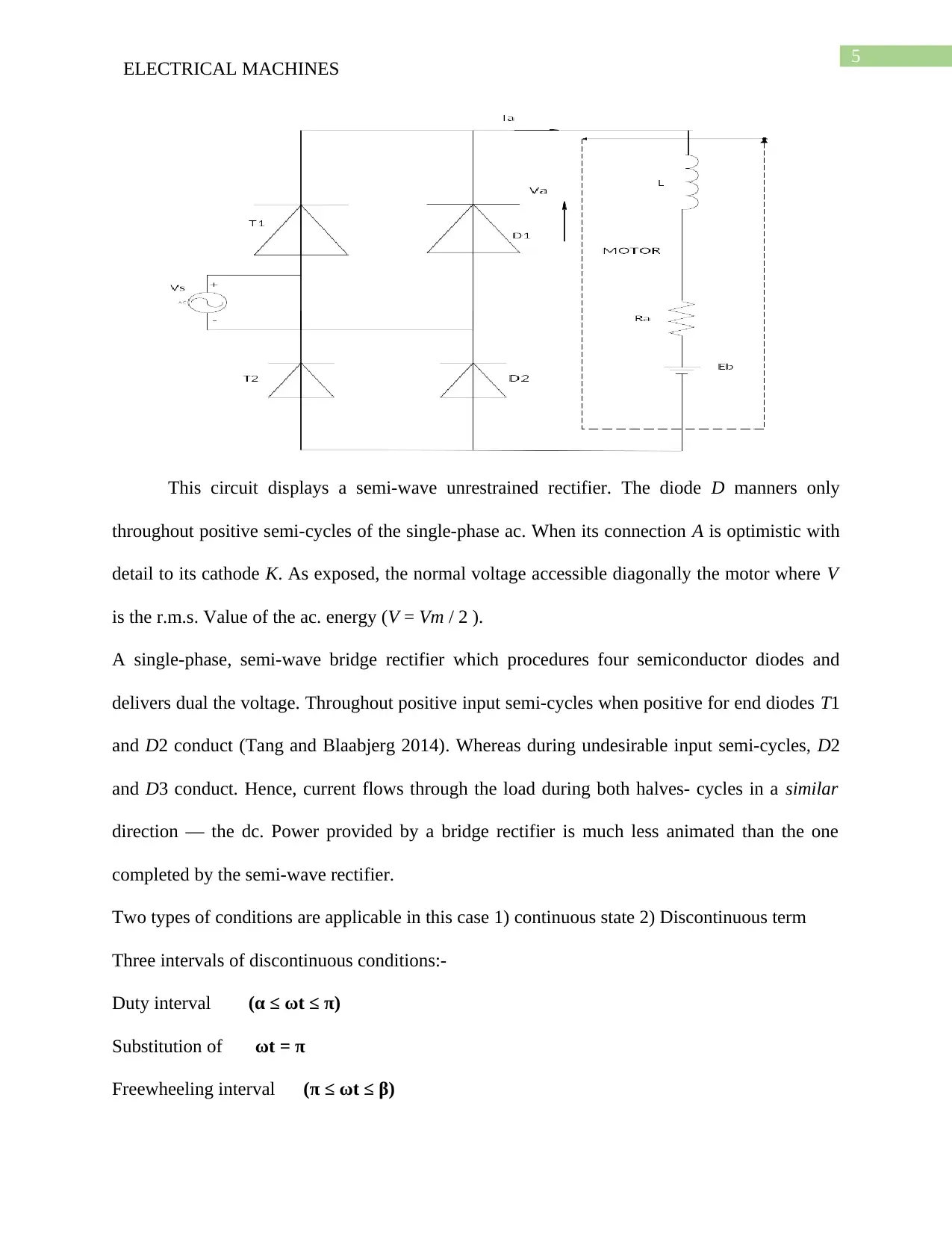
This report provides a comprehensive overview of electrical machines, focusing on single-phase rectifiers, DC drives, and DC motor control. The introduction defines DC servo motors and their applications, highlighting the importance of armature current and field control. The discussion section delves into single-phase rectifiers, explaining their function in converting AC to DC, and explores different speed control methods for DC motors. The report further examines DC drives, their categorization, and their role in optimizing voltage and speed. A significant portion is dedicated to single-phase controllers of DC motors, including semi-controlled rectifier regulators and their operational modes. It also covers armature control methods, comparing armature resistance control, and armature voltage control, and the impact of external resistors. The conclusion summarizes the key findings and emphasizes the functionality of single-phase rectifiers and their applications in electrical machines. The report references several research papers to support its analysis.


1 out of 15
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.