Comprehensive Analysis and Design of a DC Motor Control System
VerifiedAdded on 2020/05/28
|16
|1893
|327
Report
AI Summary
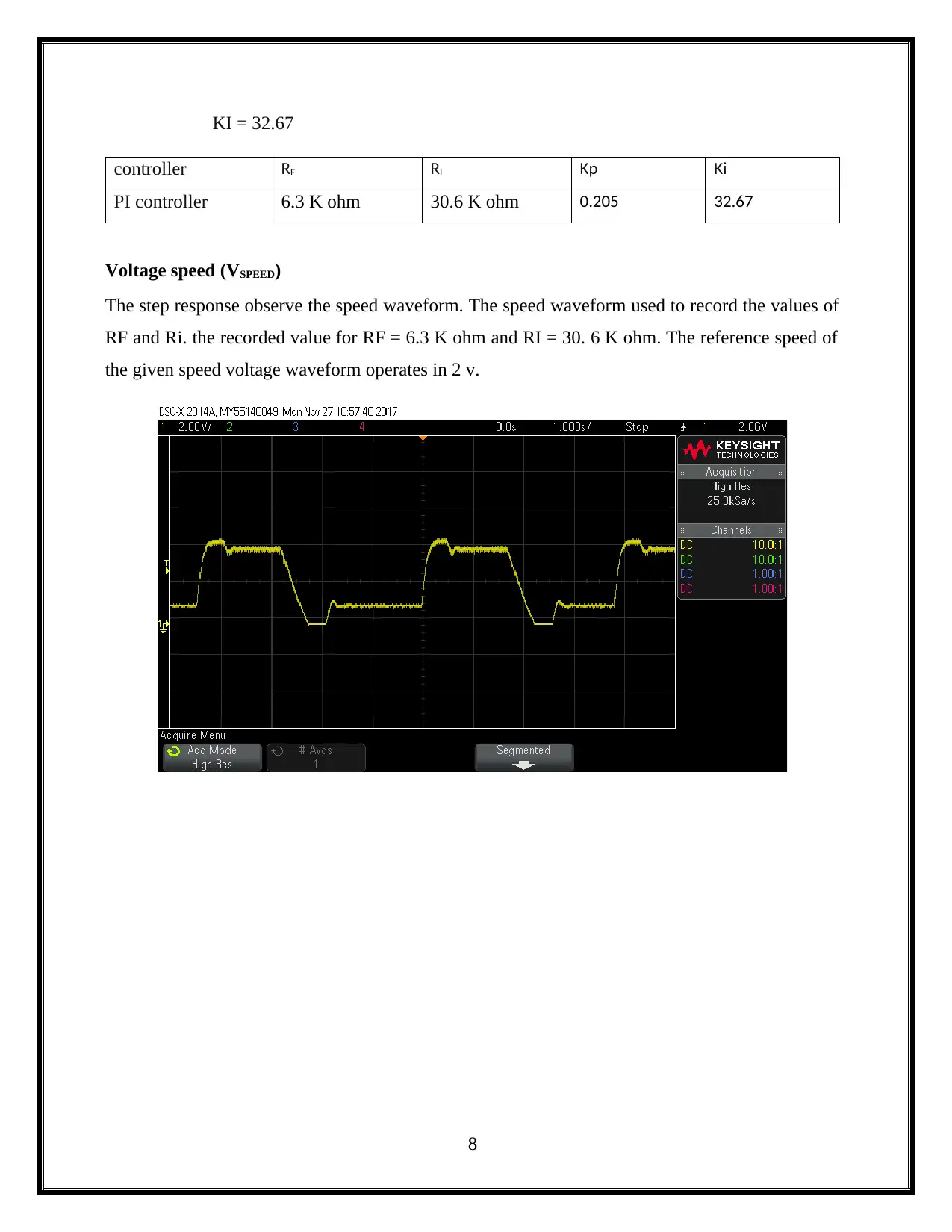
This report provides a comprehensive analysis of a DC motor control system. It begins with an overview of DC motor speed regulation, explaining how armature voltage variation controls speed. The report then delves into the input-output voltage relationship of an inverting amplifier, detailing its function in the system. The step response of the DC motor is examined to understand its dynamic characteristics, including electrical and mechanical time constants. The investigation of overall system dynamics focuses on closed-loop control, including PI controllers and their parameters. The report also explores the design of control schemes, such as time ratio control and chopper circuits, to achieve precise motor control. Motor dynamics, including torque and speed characteristics, are also analyzed, along with references to relevant literature.

1 out of 16
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.