Design and Implementation of an Autonomous Climbing Robot Project
VerifiedAdded on 2020/02/24
|9
|1827
|47
Project
AI Summary
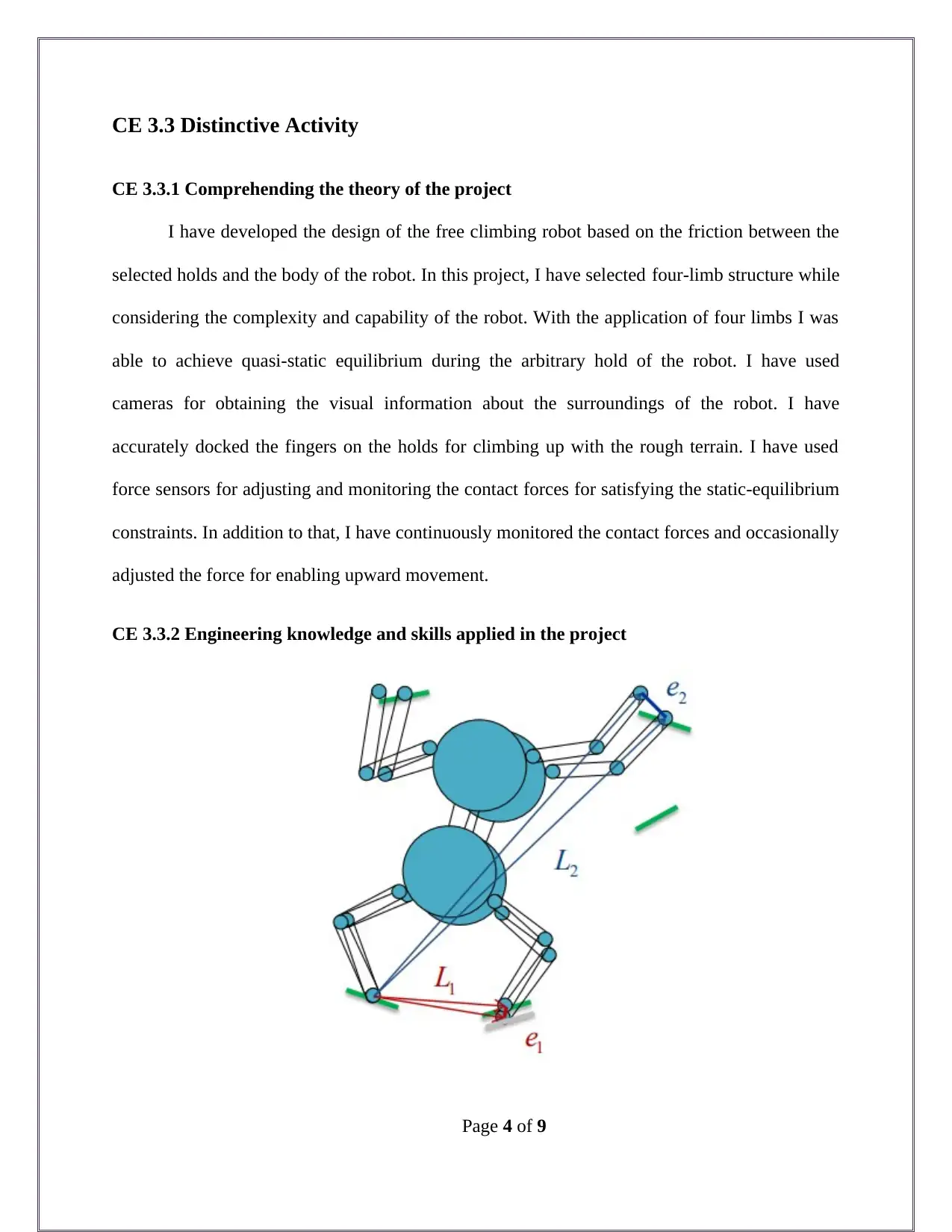
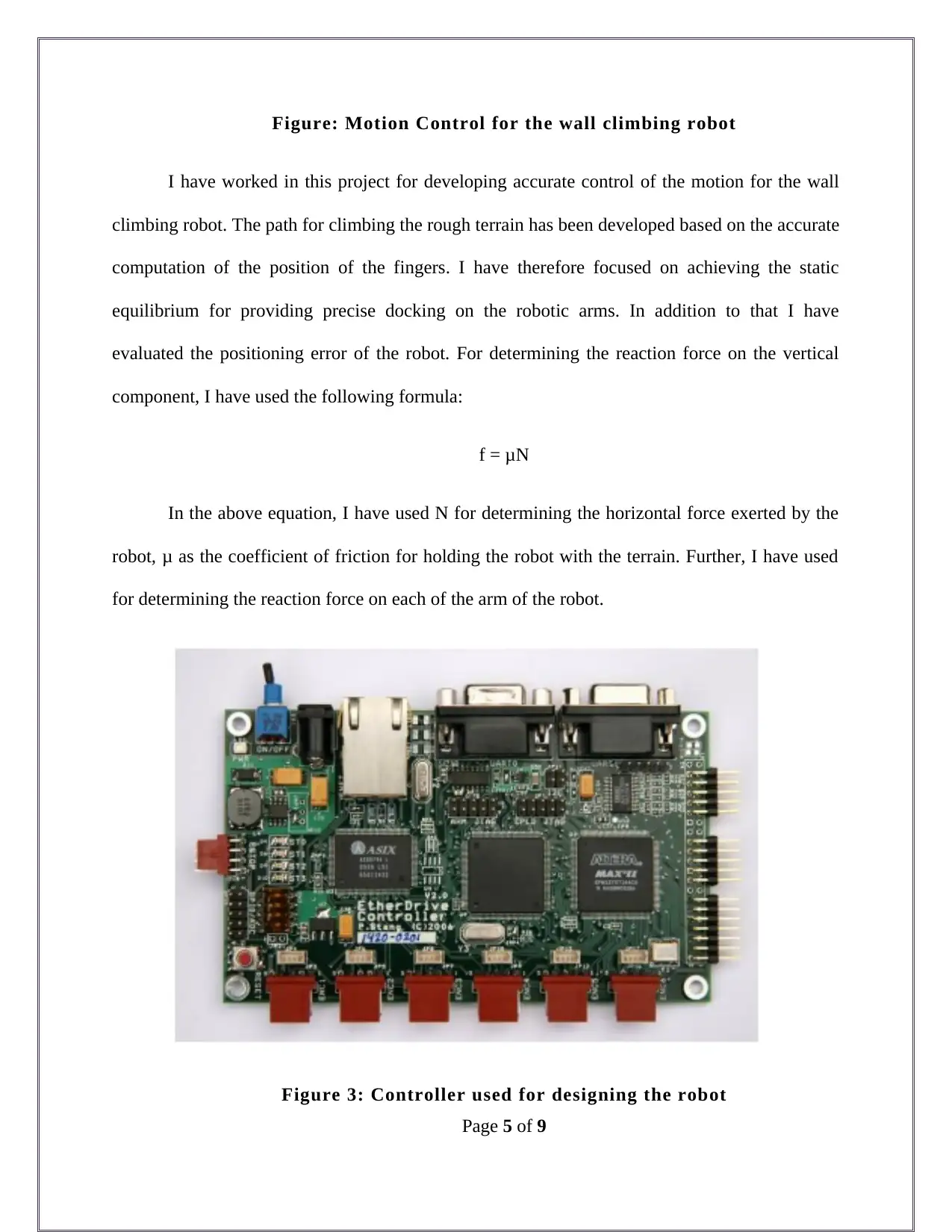
This project report details the design and implementation of an autonomous climbing robot, focusing on its ability to navigate rough terrains autonomously. The project's objectives included determining working principles, evaluating hardware components, integrating appropriate designs, developing kinematic designs, and testing smooth motion. The student's area of work involved implementing the hardware architecture, documenting the project, and conducting tests. The report describes the robot's design, which utilized a four-limb structure, cameras, and force sensors for climbing. The student applied engineering knowledge in motion control, using formulas to determine reaction forces and a 6-channel controller board for controlling the robot's movements. The project faced issues with motion planning and multi-contact force control, which were addressed through the study of quasi-static climbing and adjustment of forces. The student also focused on preventing slippage by refining the algorithm. This project showcases collaborative work with team members and a supervisor, highlighting the development and testing of a free climbing robot capable of navigating both vertical and planar terrains.
1 out of 9
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.