Analysis of Two Degree of Freedom Systems
VerifiedAdded on 2020/02/18
|11
|1442
|152
AI Summary
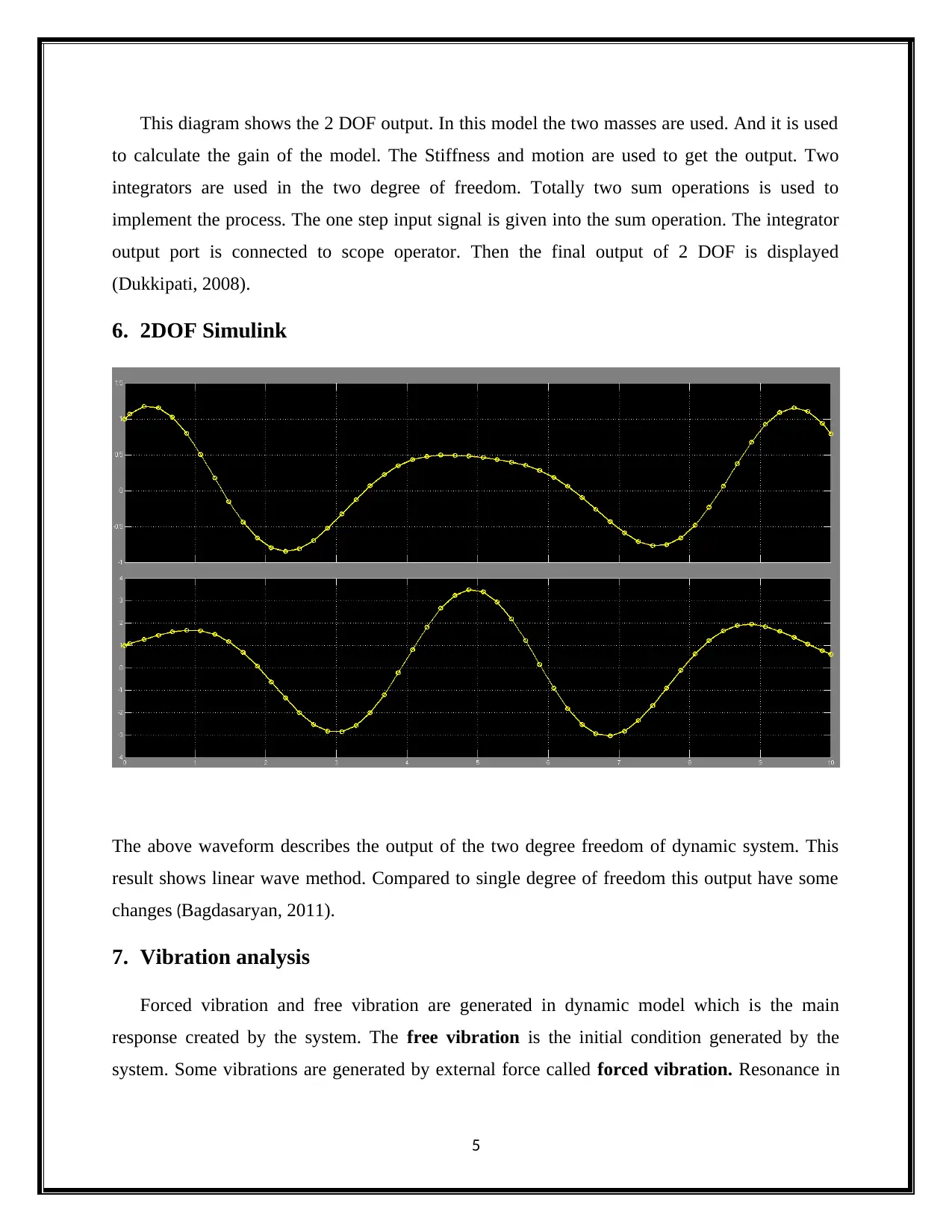
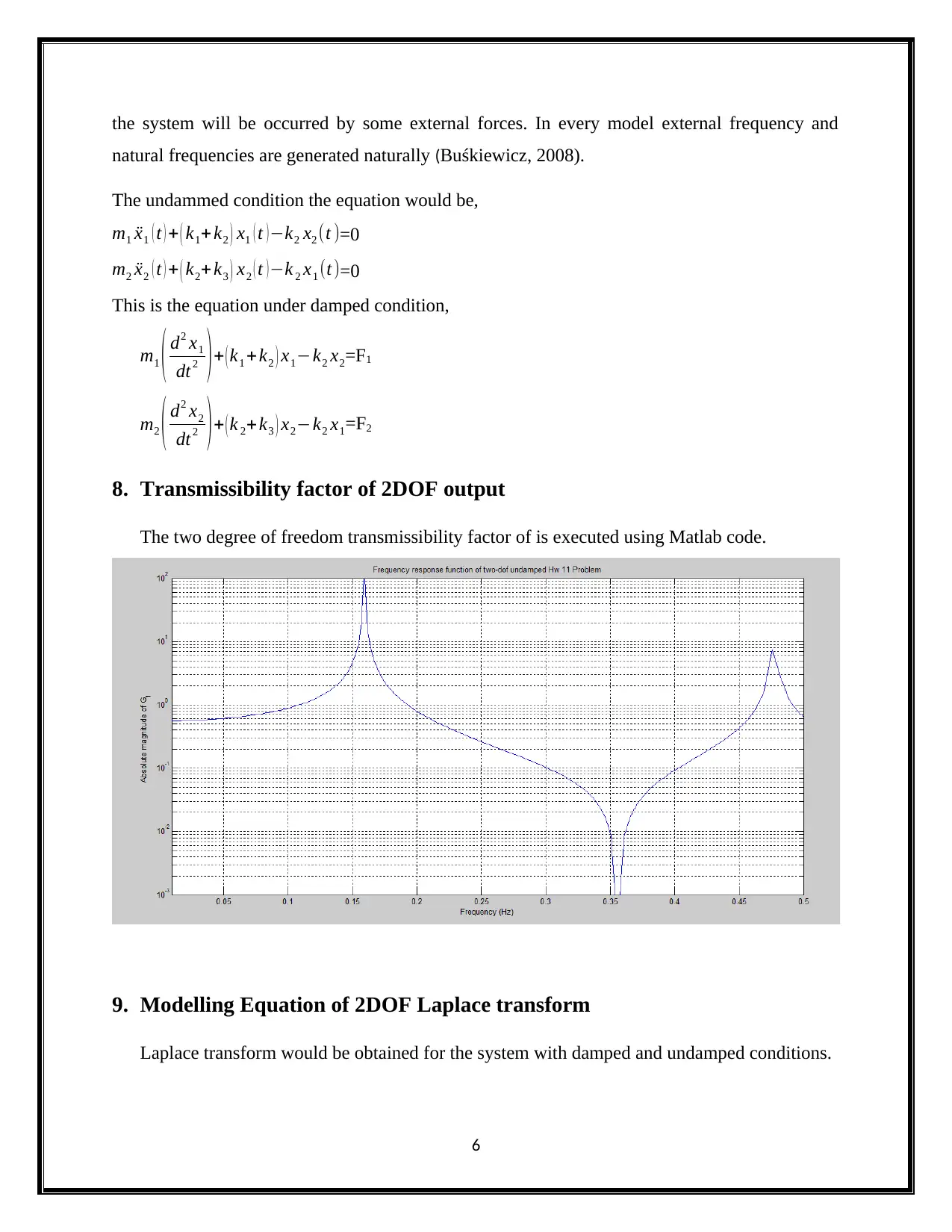
This assignment delves into the analysis of a Two Degree of Freedom (2DOF) system utilizing MATLAB Simulink. It focuses on constructing mathematical models using Laplace transforms, deriving transfer functions to represent the system's behavior, and evaluating the suspension performance characteristics. The analysis includes a comparison with simpler One Degree of Freedom (1DOF) systems, highlighting the advantages and complexities introduced by the additional degrees of freedom.
Contribute Materials
Your contribution can guide someone’s learning journey. Share your
documents today.

1 out of 11
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
© 2024 | Zucol Services PVT LTD | All rights reserved.