MATLAB & Simulink: Patient Lift Automatic Control Systems Lab
VerifiedAdded on 2023/06/11
|12
|879
|314
Practical Assignment
AI Summary
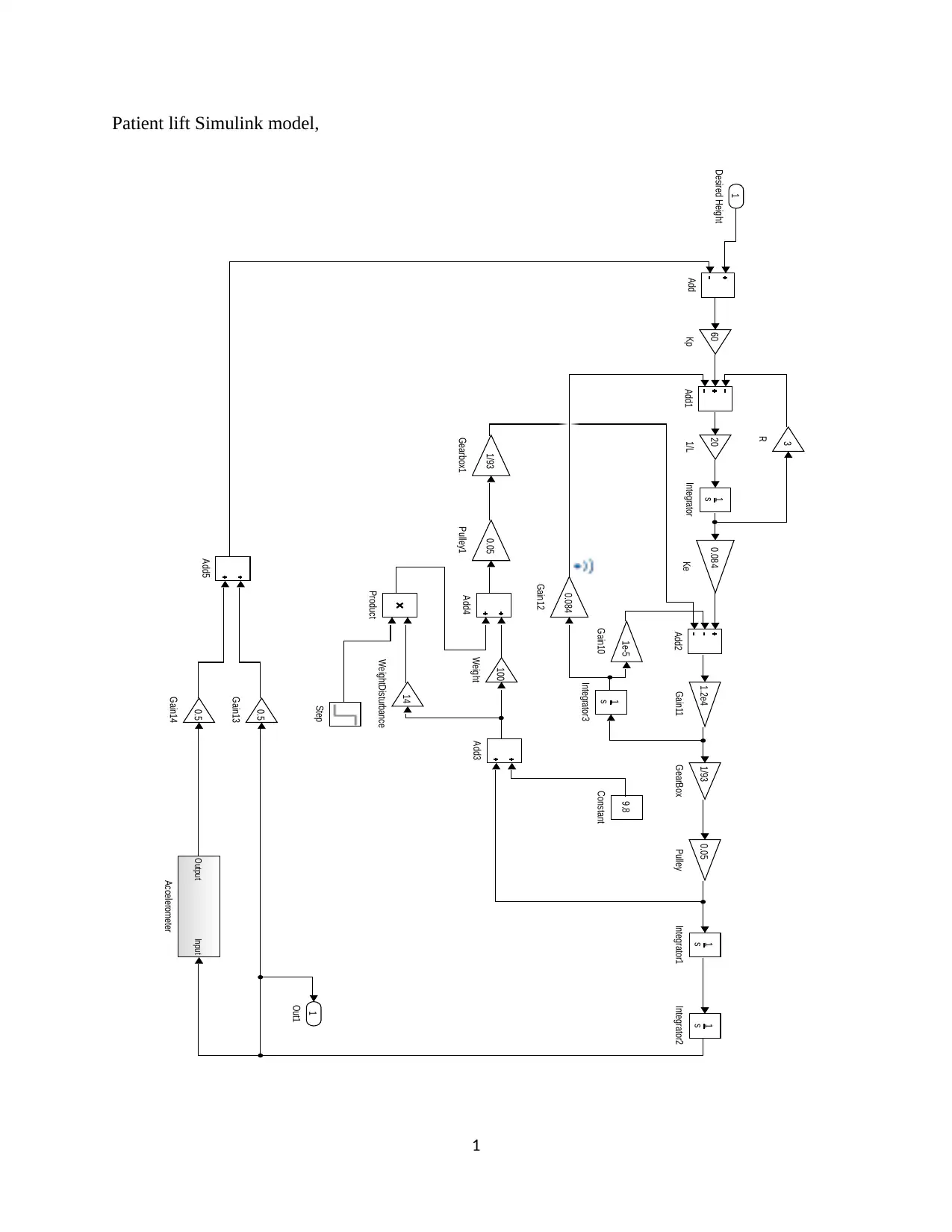
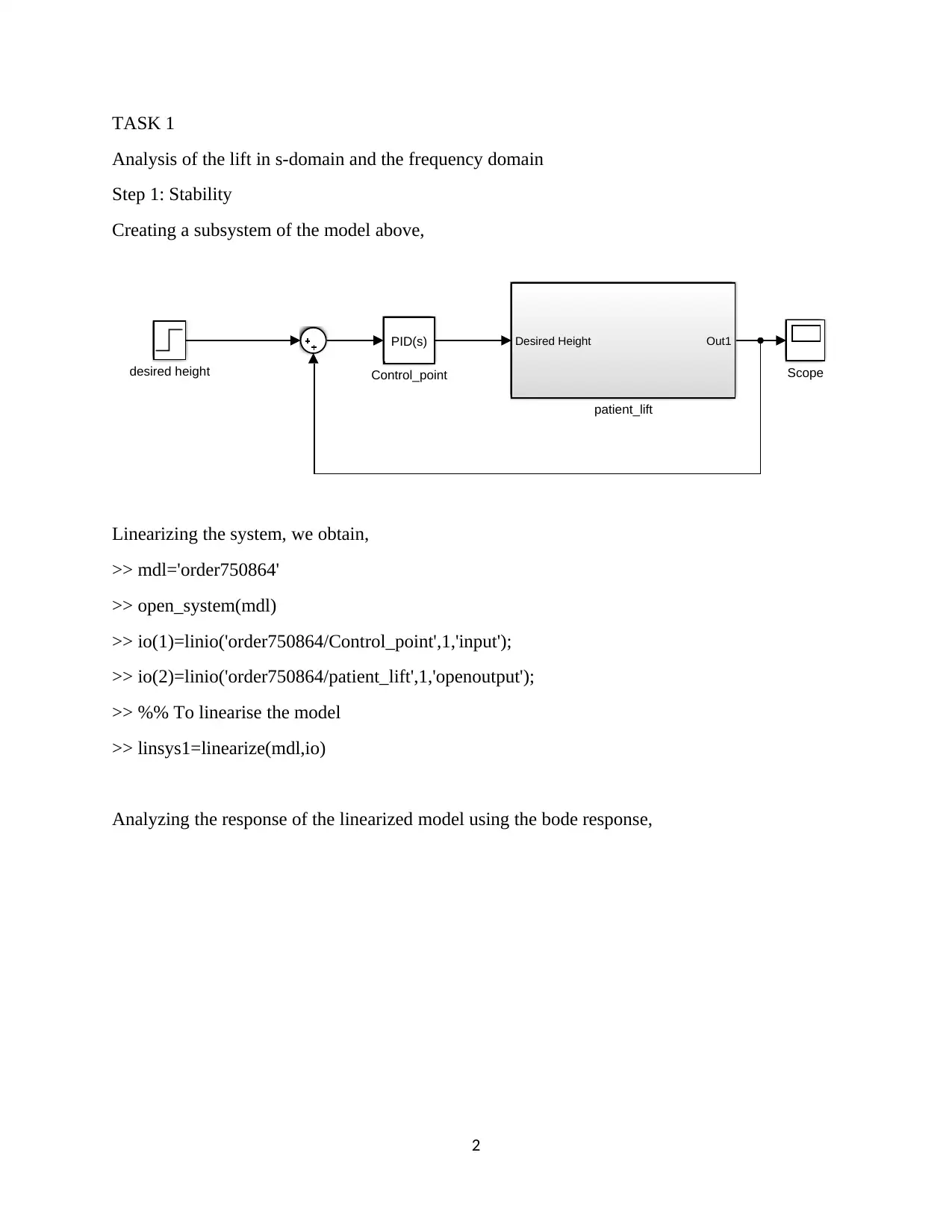
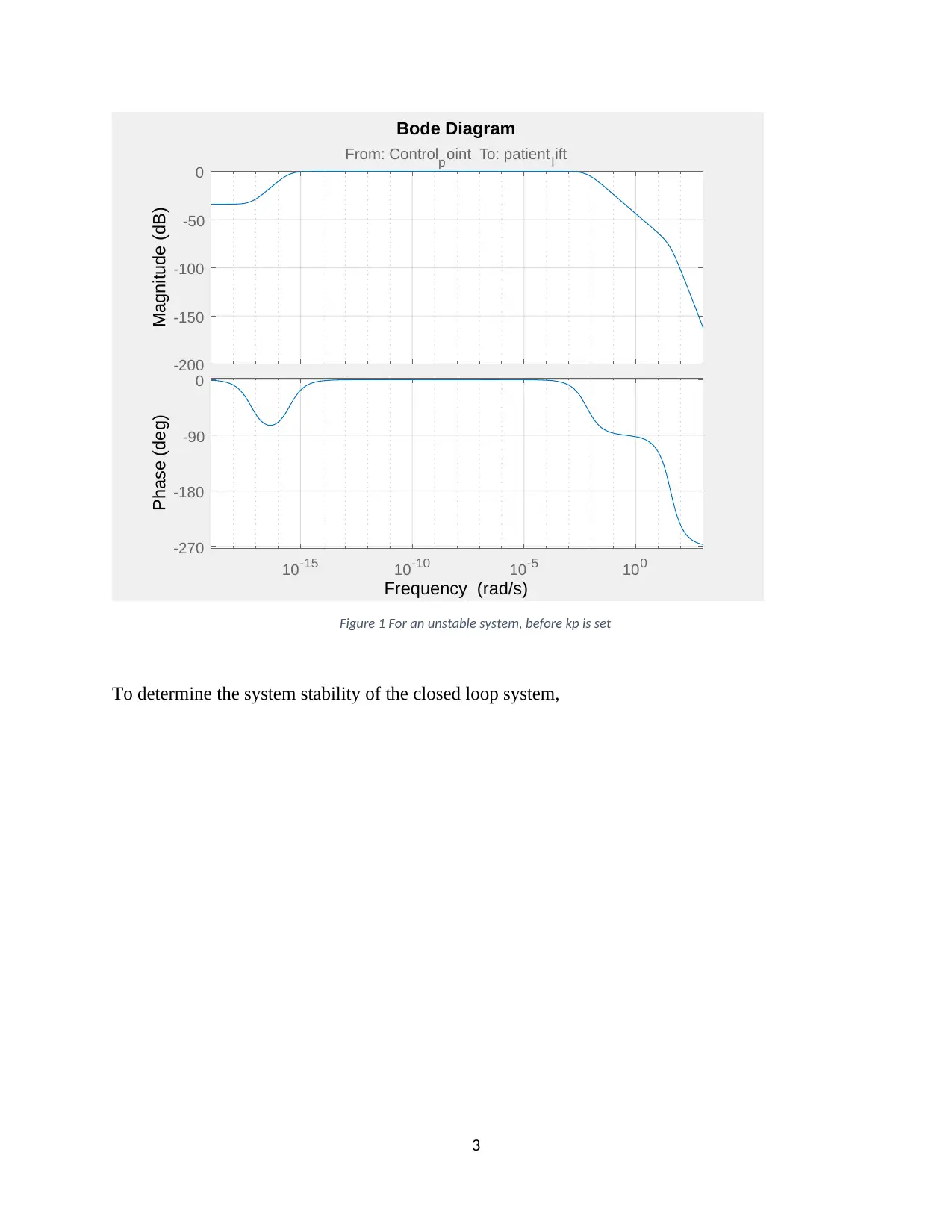
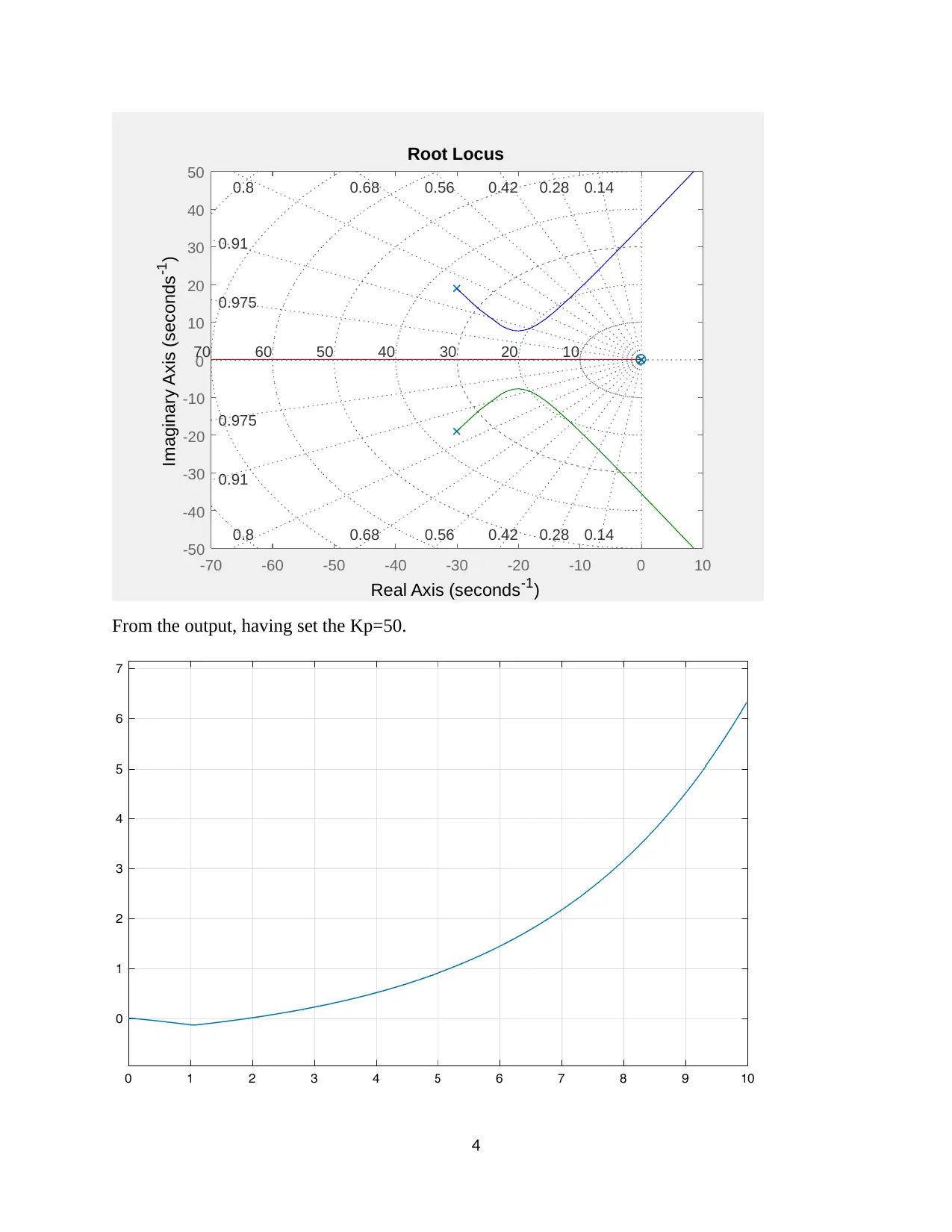
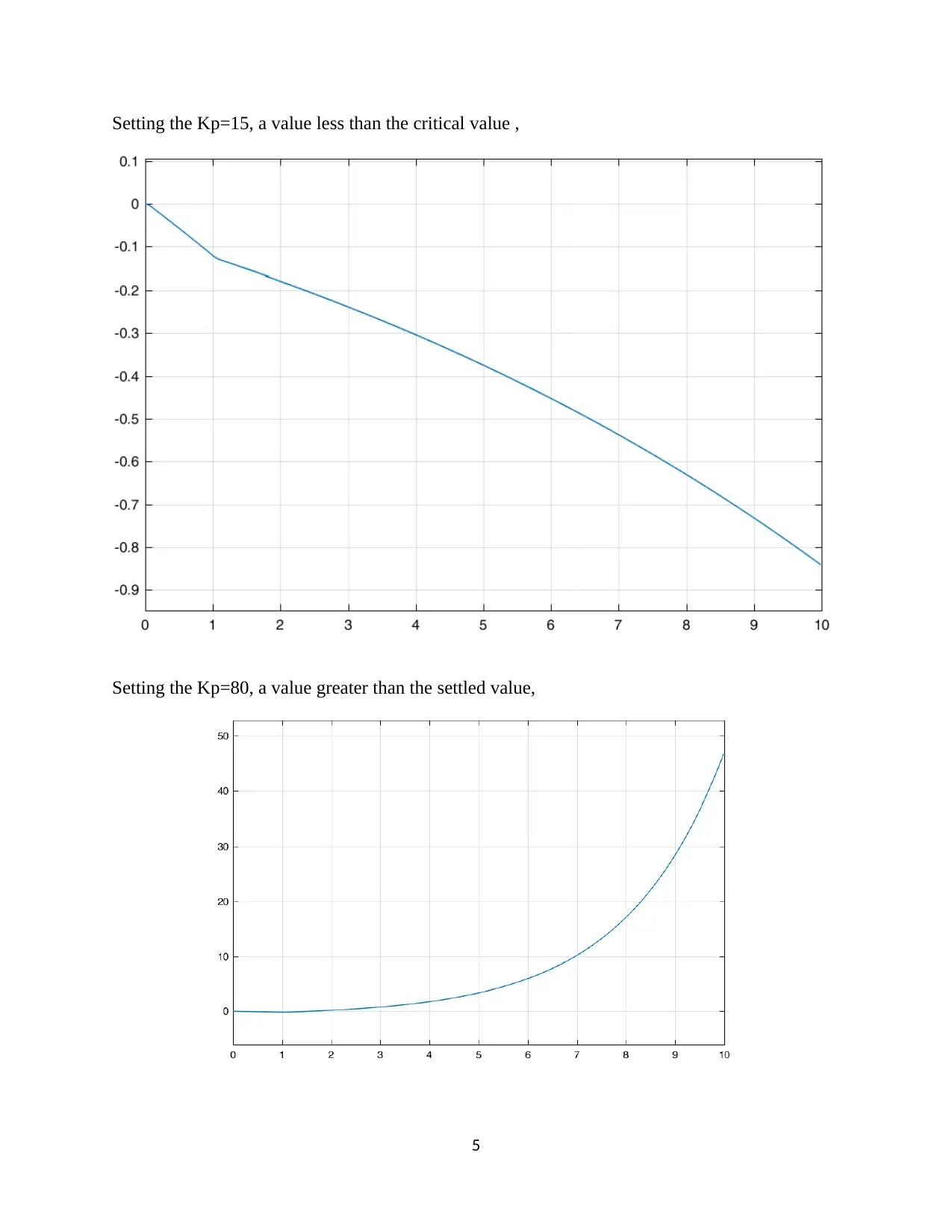
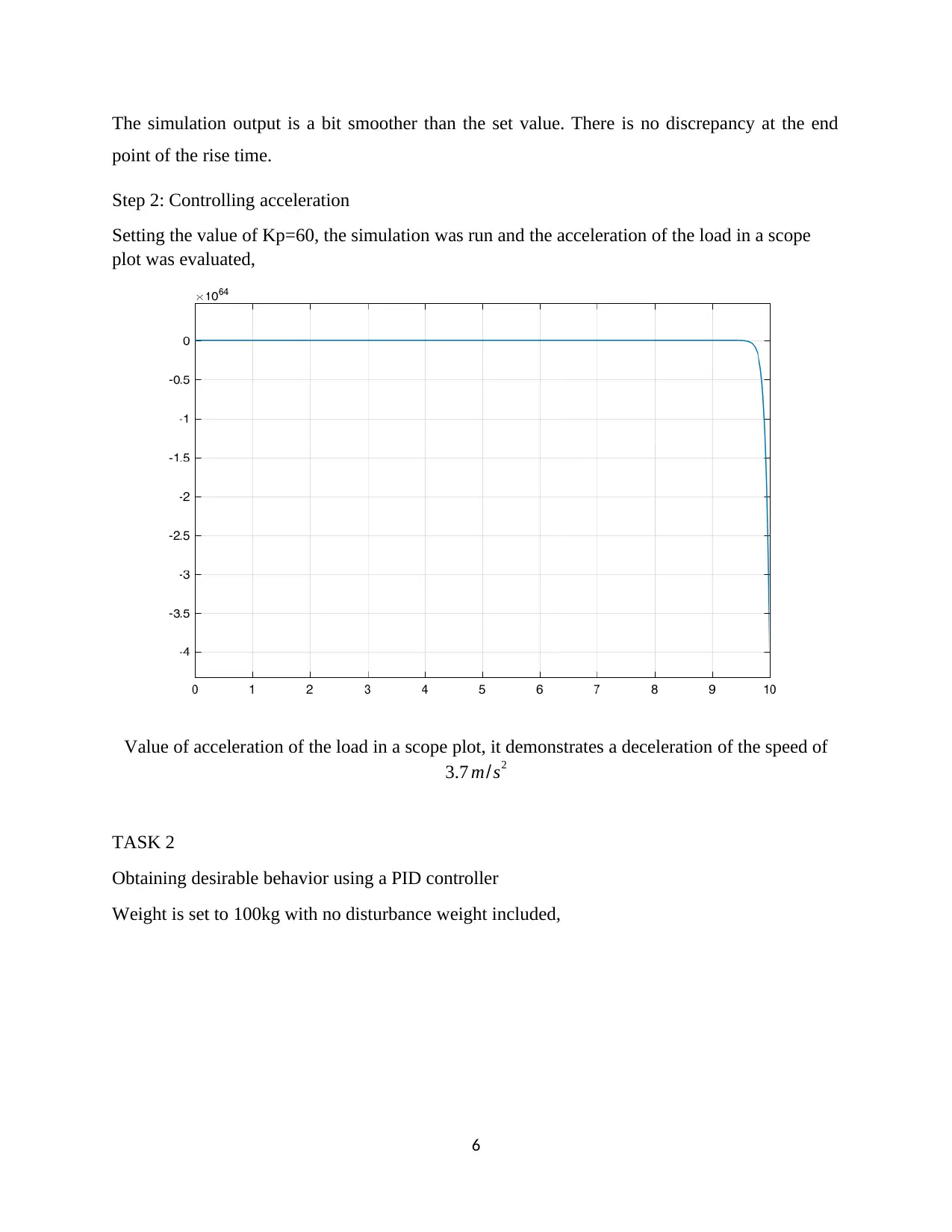
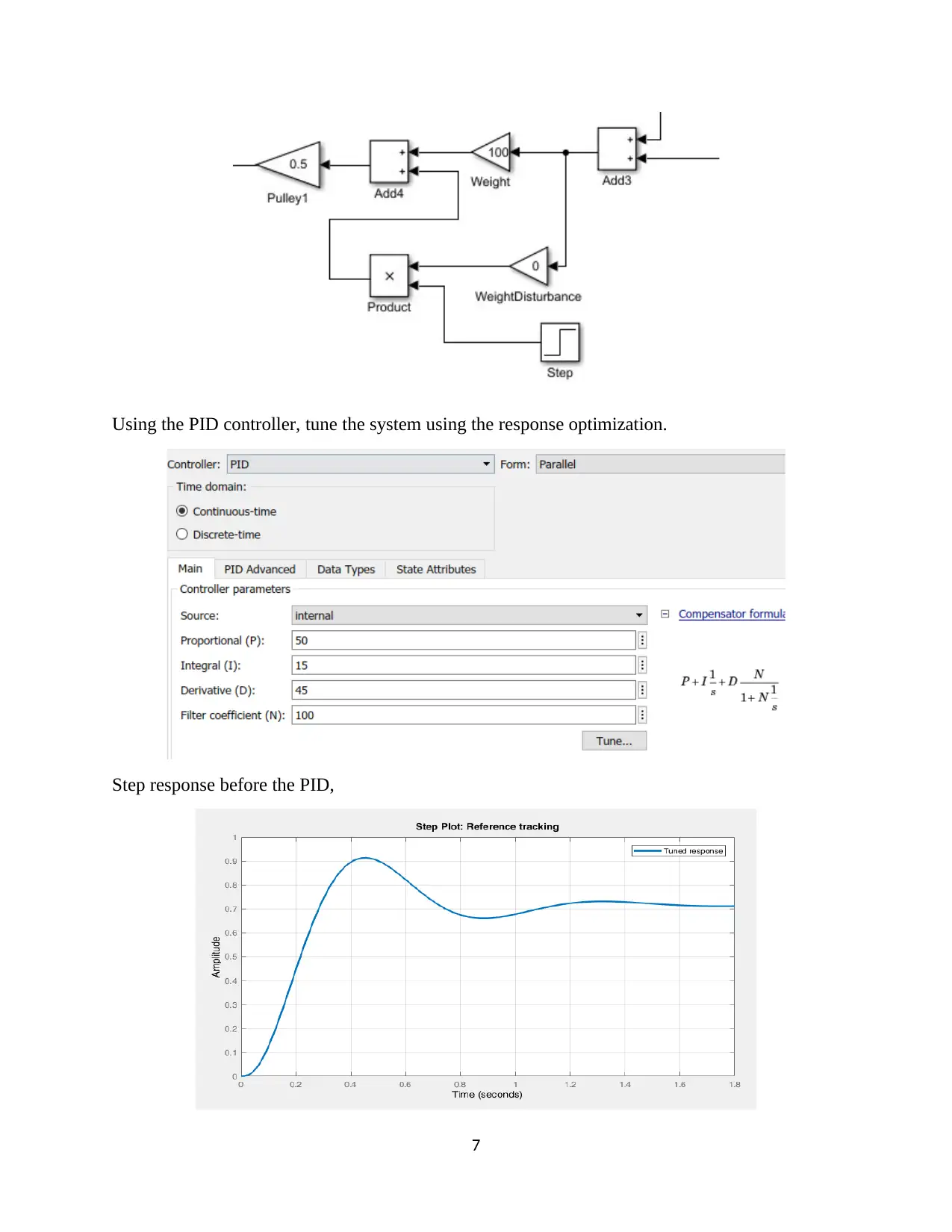
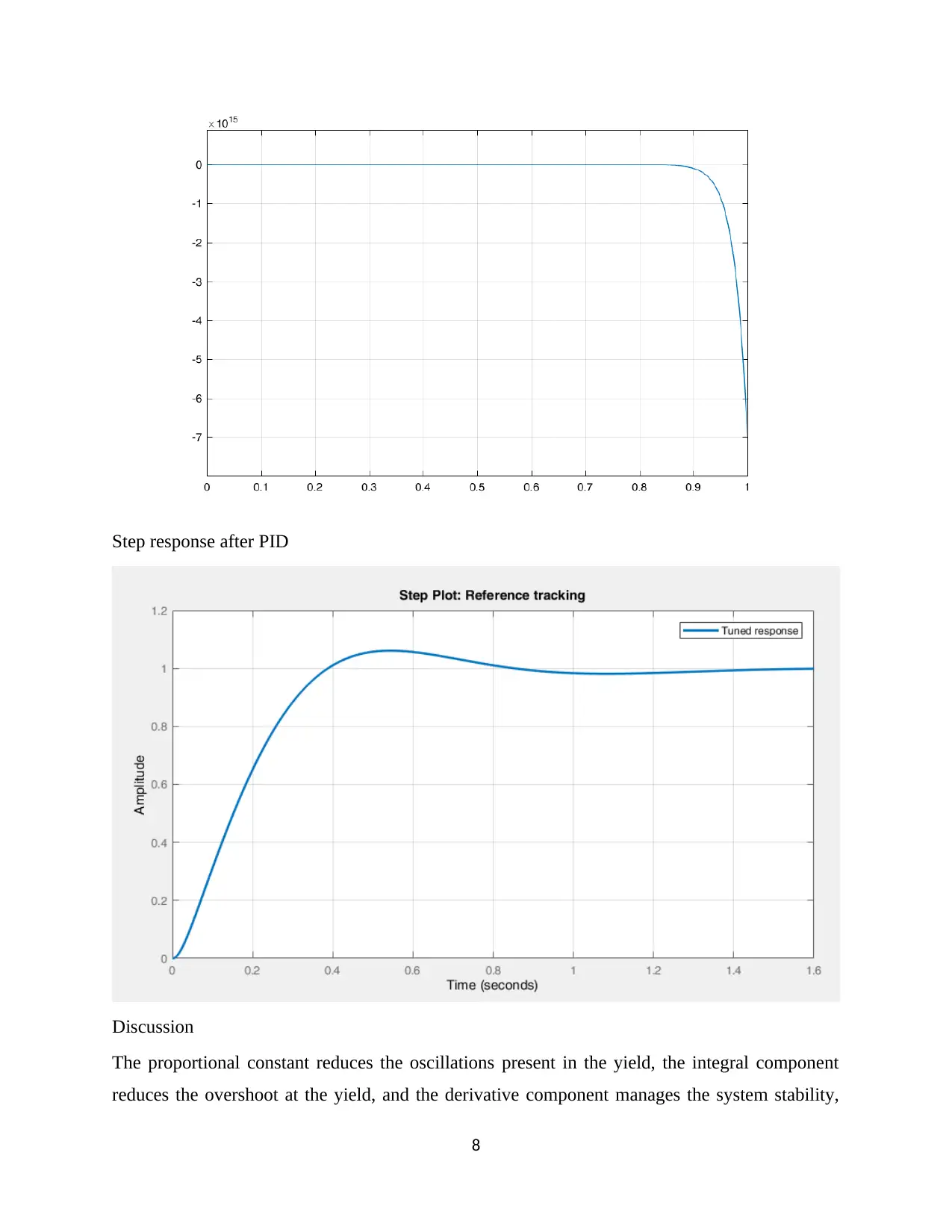
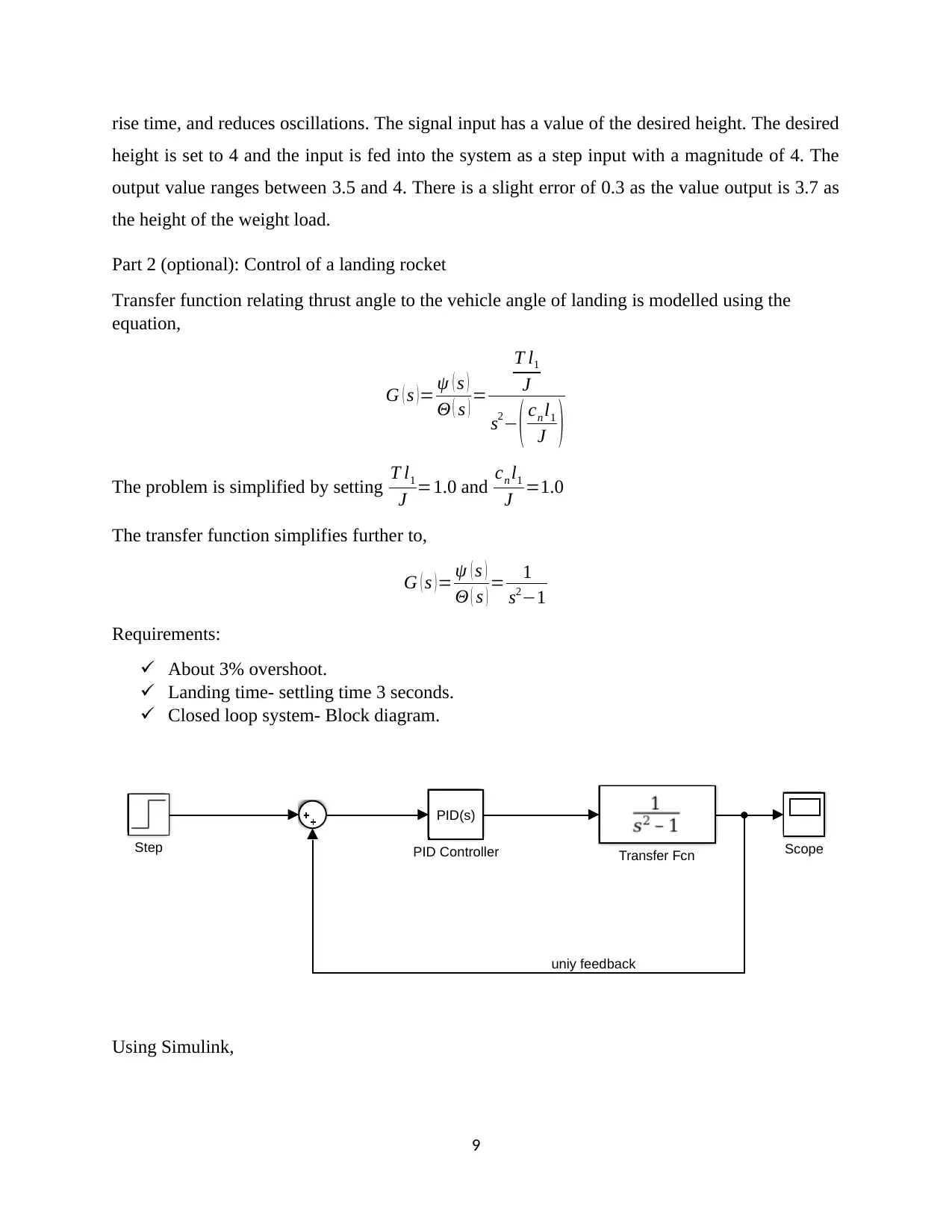
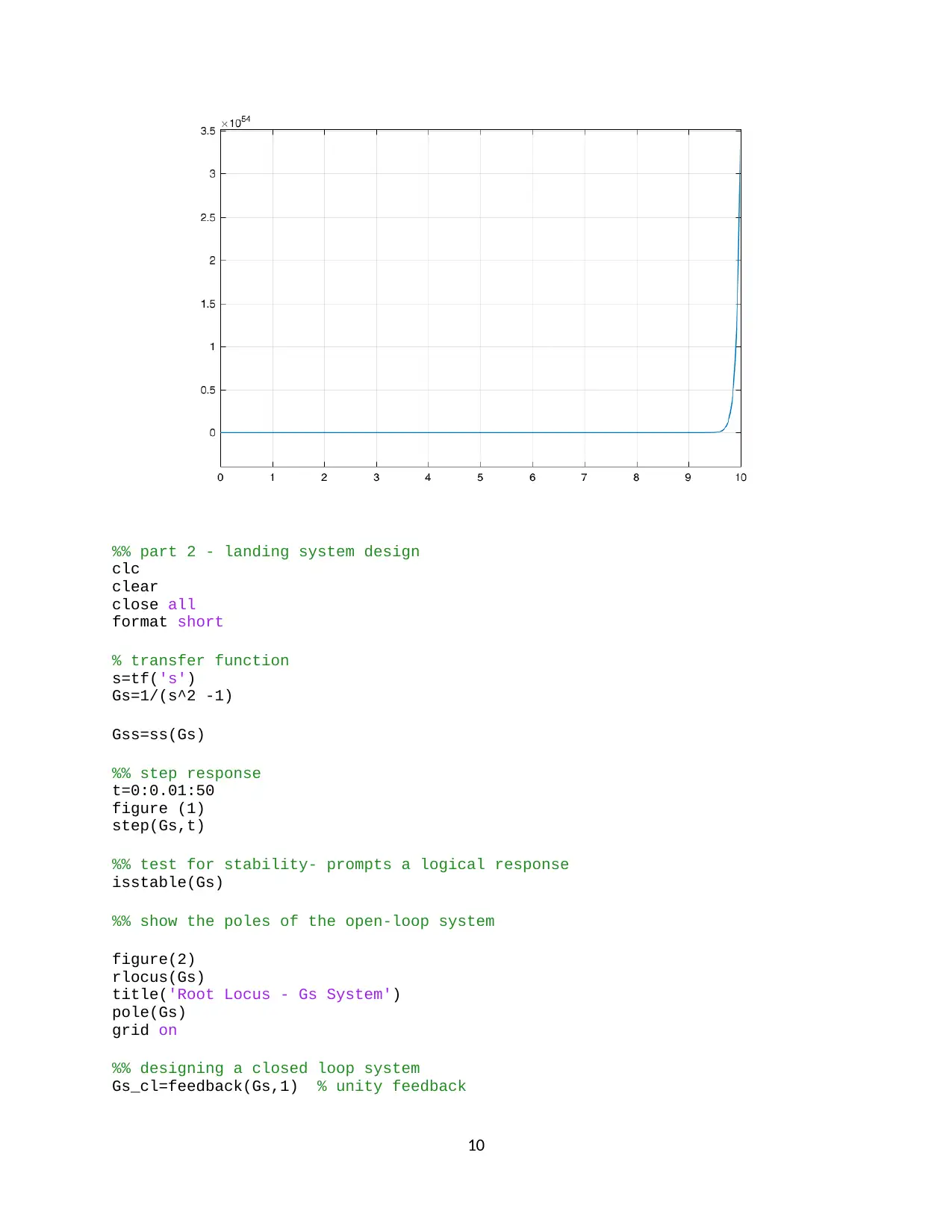
This assignment focuses on the analysis and control of a patient lift system using MATLAB and Simulink. The first task involves analyzing the lift's stability in the s-domain and frequency domain by linearizing the system and examining its root locus and Bode plots to determine a suitable proportional gain (Kp). The goal is to control the lift's acceleration by setting an appropriate Kp value and evaluating the load's acceleration. The second task involves achieving desirable behavior using a PID controller, tuning the system for optimal response with a 100kg weight. The discussion highlights the roles of proportional, integral, and derivative components in reducing oscillations, overshoot, and ensuring system stability. Part 2 (optional) explores the control of a landing rocket, modeling the transfer function and designing a closed-loop system with a PID controller to meet specific overshoot and settling time requirements. The assignment uses Simulink to simulate and analyze the system's behavior, including step responses and root locus plots, to achieve the desired control performance.
1 out of 12
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.