Competency Demonstration Report: Hybrid Agricultural Robot Design
VerifiedAdded on 2023/05/28
|10
|1608
|325
Report
AI Summary
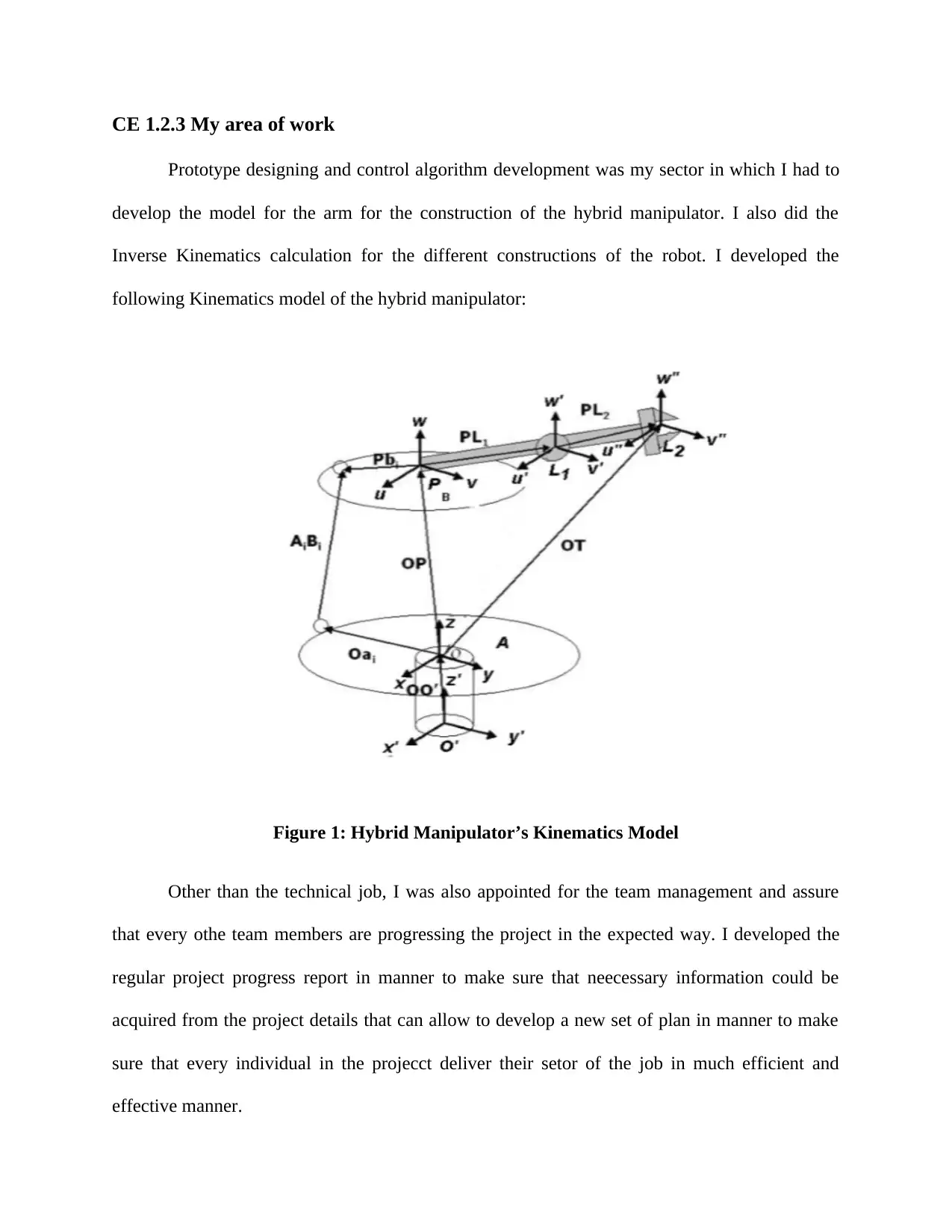
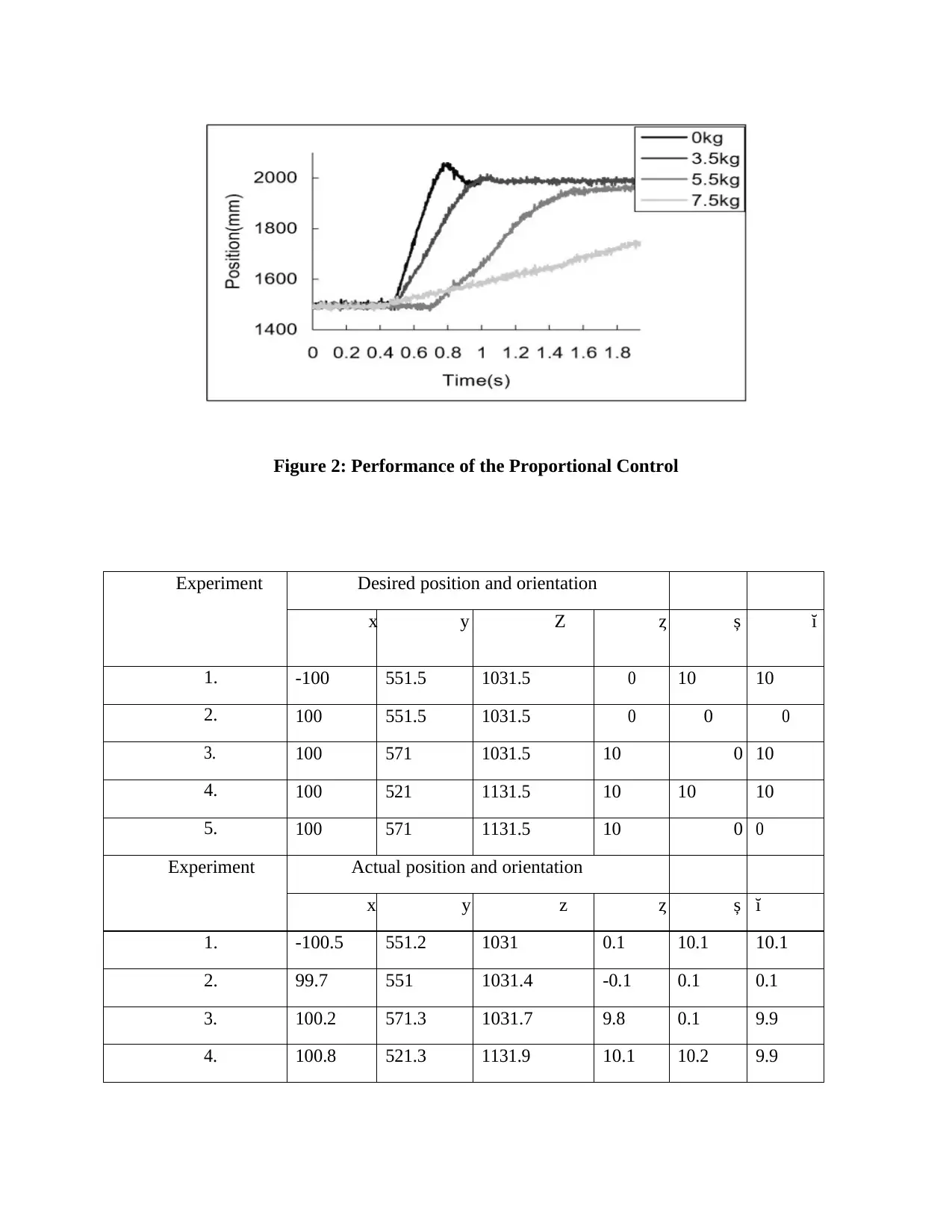
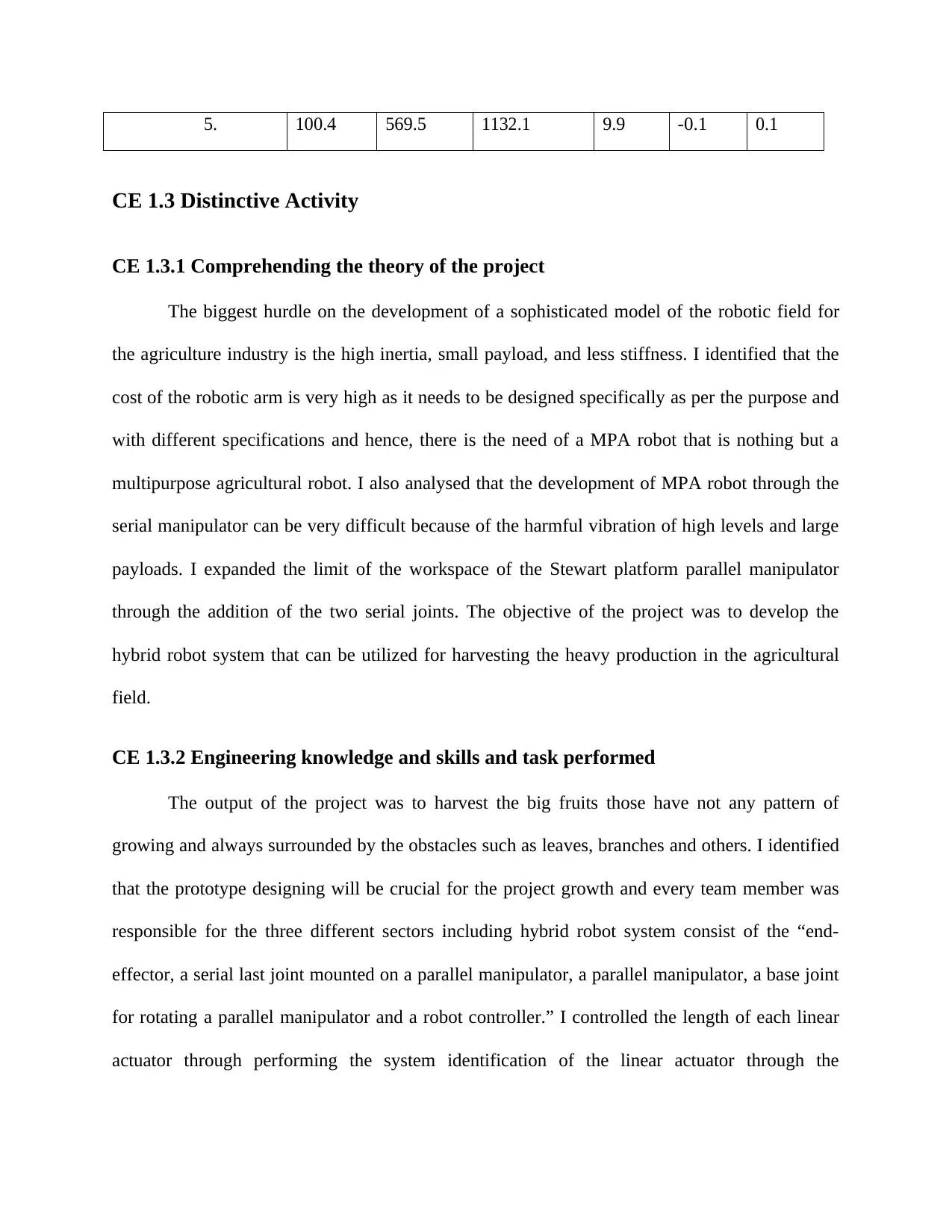
This report details the design and implementation of a hybrid agricultural robot, focusing on the development of a robotic arm for harvesting heavy fruits. The project aimed to create a functional and operable robot capable of overcoming obstacles like leaves and branches. The student's responsibilities included prototype designing, control algorithm development, and team management. The report covers the kinematics model, control strategies using PID and fuzzy controllers, and the challenges faced, such as variable loads. The project involved a team with a supervisor, leader, and team members, and the student was responsible for overseeing the project's progress and ensuring the team met its objectives. The report highlights the innovative approach of integrating fuzzy and proportional controllers to mitigate the effects of variable loads, differentiating the robot from existing serial-type agricultural robots.


1 out of 10
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.