CDR Writing: Competency Claim with Career Episodes - Engineering
VerifiedAdded on 2023/05/28
|11
|2019
|176
Portfolio
AI Summary
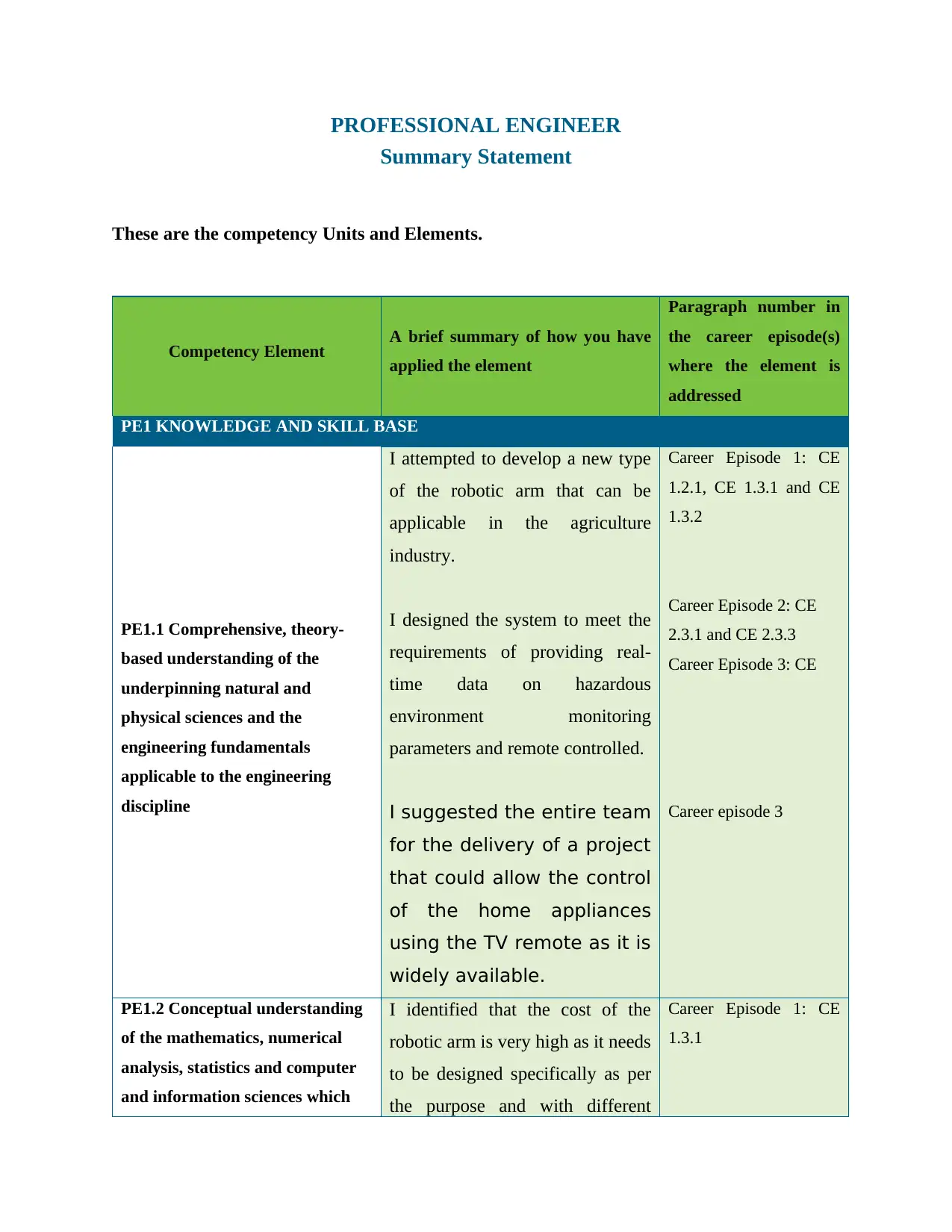
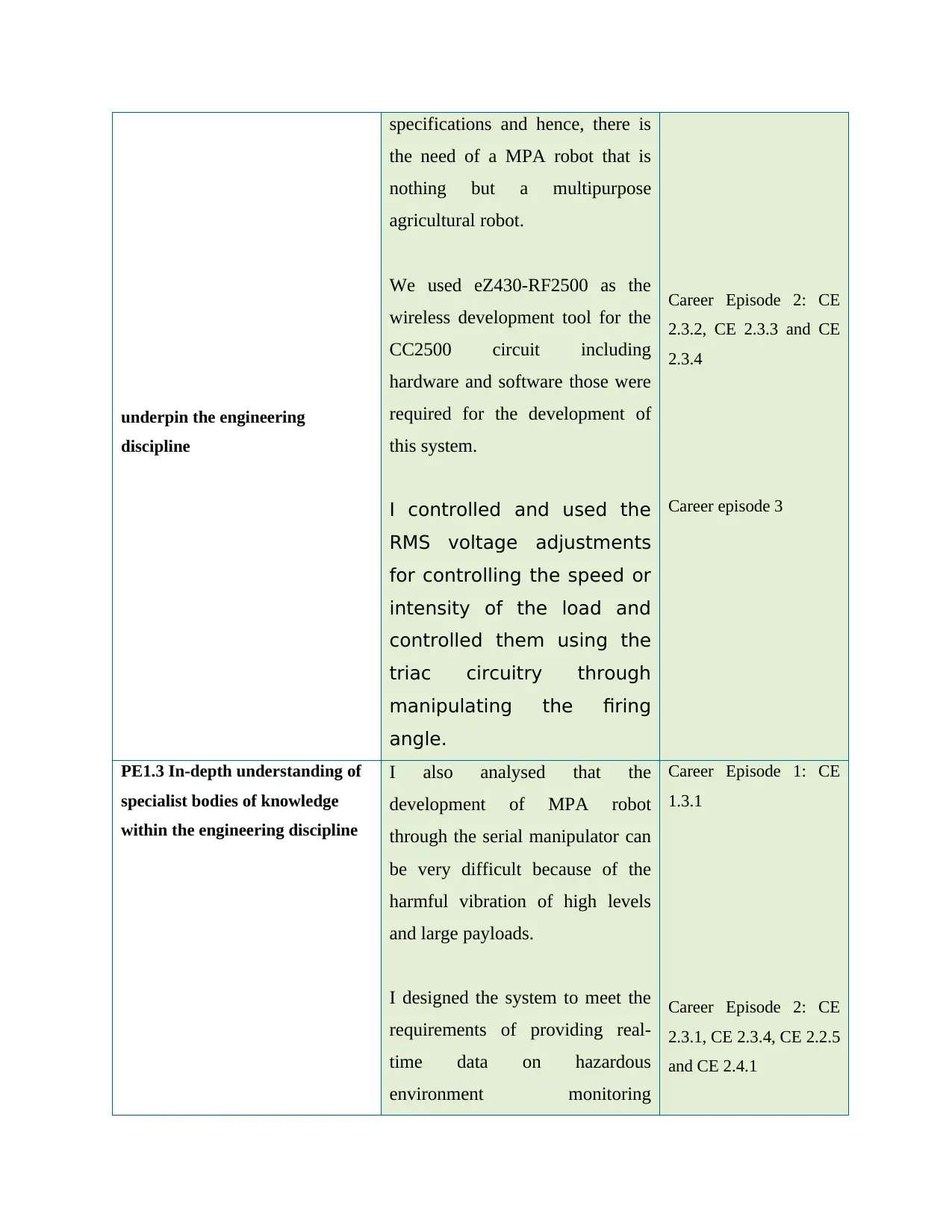
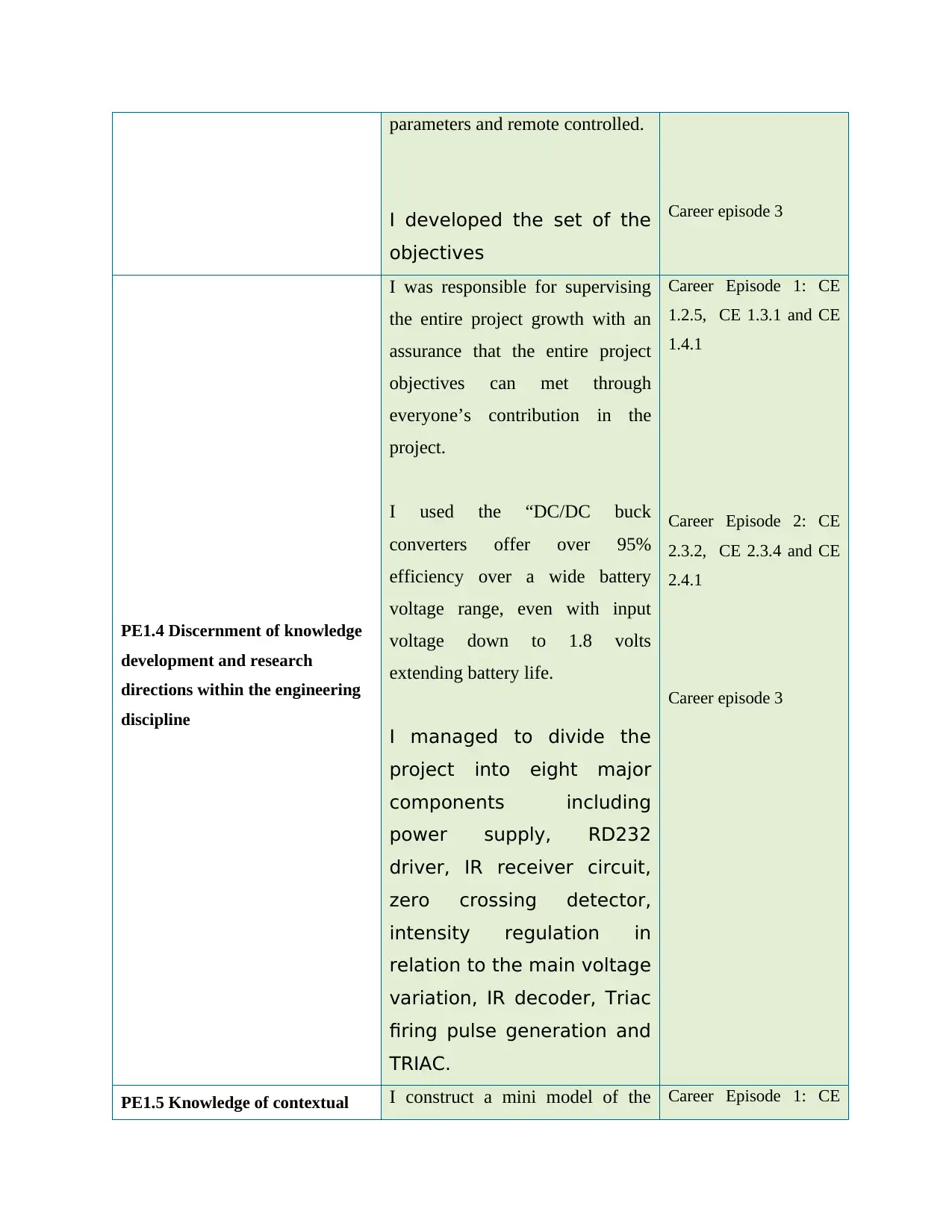
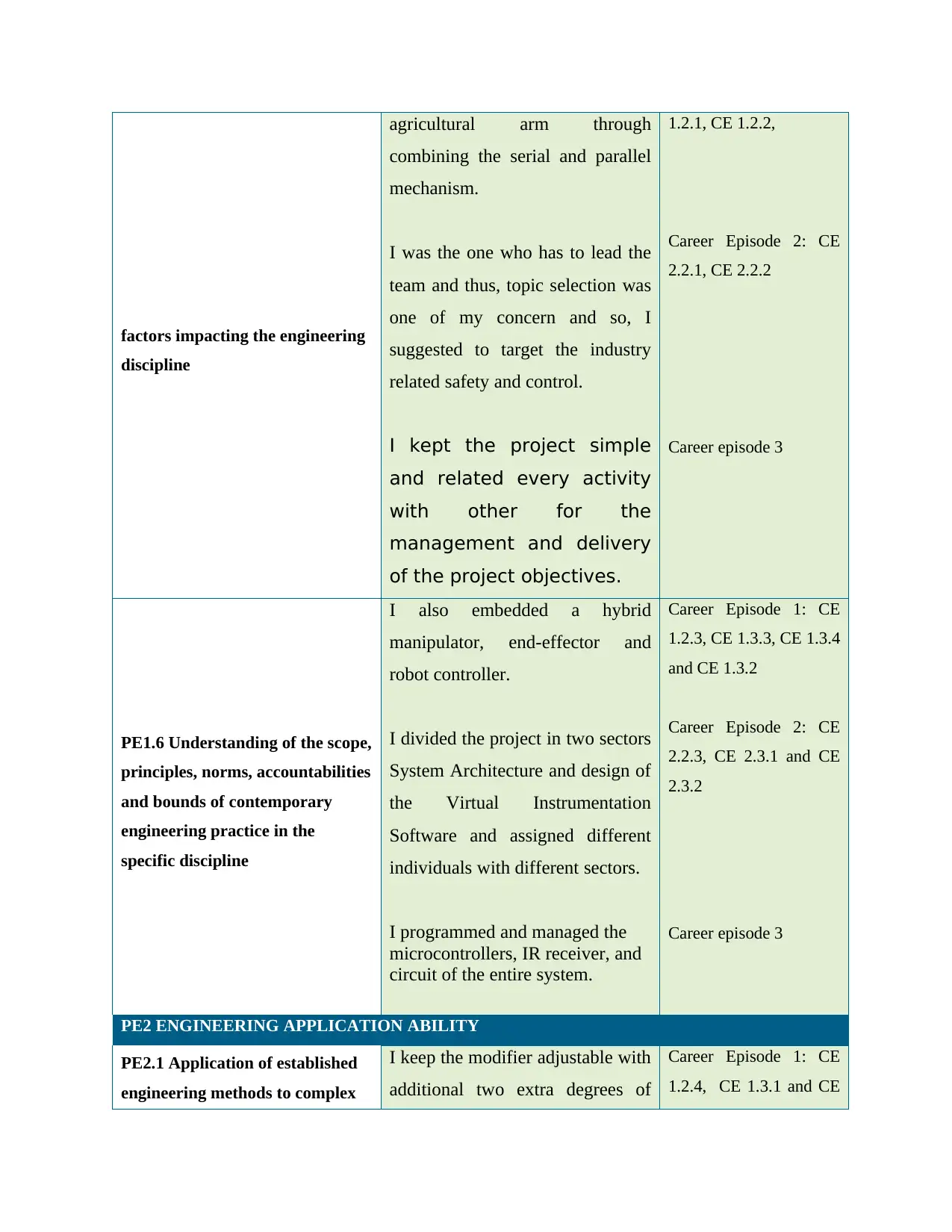
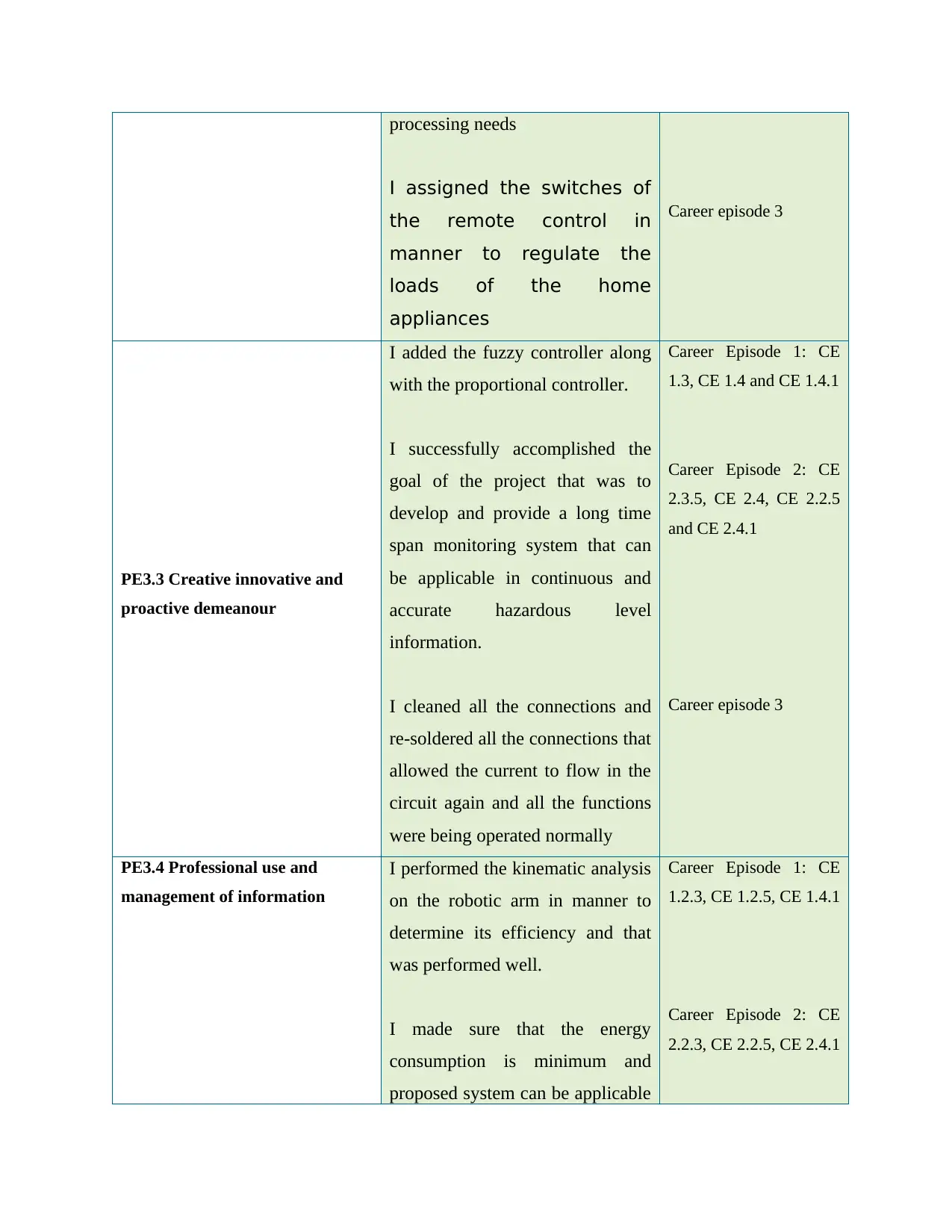
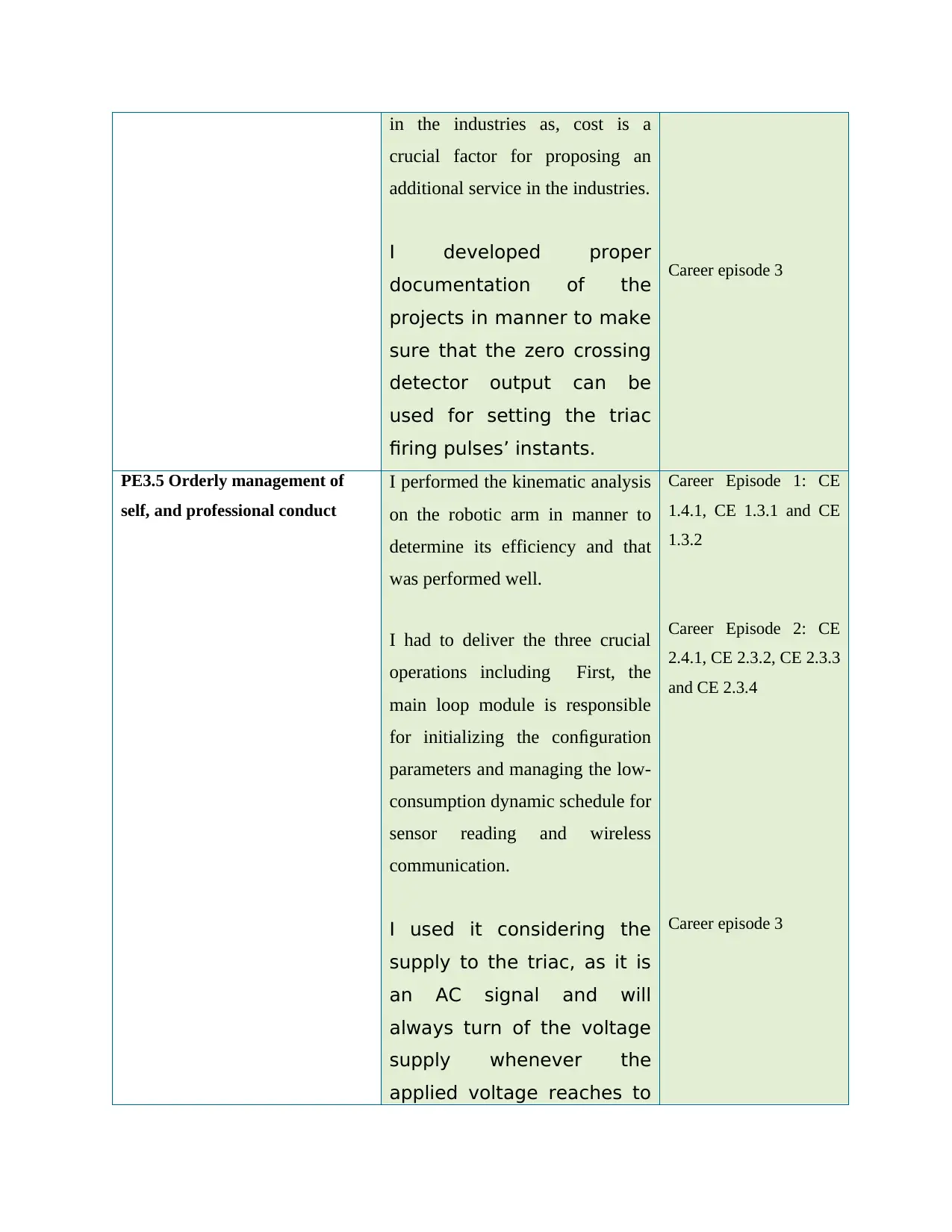
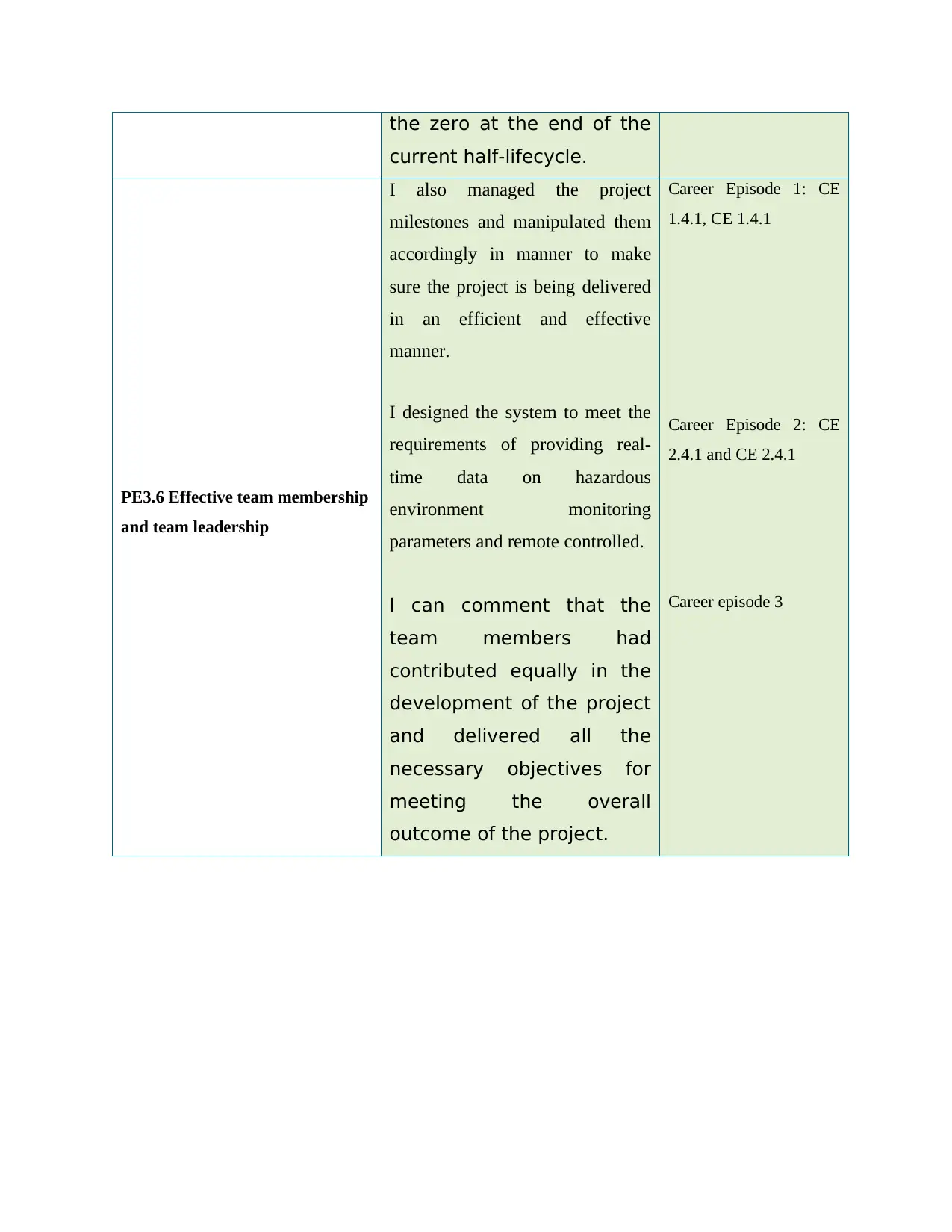
This document presents a competency claim for a professional engineer, detailing knowledge, skills, and engineering application abilities through summaries of career episodes. It covers aspects such as a theory-based understanding of engineering fundamentals, conceptual understanding of mathematics and computer sciences, in-depth knowledge within the engineering discipline, and discernment of knowledge development and research directions. The document also highlights the application of established engineering methods, systematic engineering synthesis and design, ethical conduct, effective communication, creative demeanor, and orderly management of self and professional conduct. Three career episodes are referenced throughout the document, showcasing practical application of these competencies in projects related to robotic arm development for agriculture, hazardous environment monitoring, and home appliance control using TV remotes. The document emphasizes project management, technical skills, and adherence to professional standards. Desklib offers a platform to access similar solved assignments and past papers.
1 out of 11
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.